
Введение
Арктический регион представляет собой уникальную среду с особыми природными условиями и географическими особенностями. В связи с тем, что большая часть этой территории населена весьма разреженно, и имеет сложный доступ по суше, воздушное сообщение становится жизненно важным элементом обеспечения не только экономической активности, но и общественной связности в регионе.
Однако, осуществление воздушного сообщения в Арктической зоне сталкивается с рядом сложностей, включая плохую радиотехническую оснащенность, отсутствие возможности использования классических средств навигации и посадки и сложные метеорологические условия, что создает серьезные вызовы для безопасности и эффективности авиаперевозок.
Так, в полярных районах Земли из-за невысокого наклонения орбит спутников Navstar GPS их точность ухудшается, что ограничивает заходы на посадку по GLS. Большинство аэродромов представляют из себя грунтовые посадочные площадки с отсутствием радиотехнических средств, с возможностью осуществления только визуальных заходов на посадку.
Метеорологические и природные условия, в частности экстремально низкие температуры, отсутствие естественного освещение (полярная ночь) снижают объемы воздушных перевозок в Арктическом регионе.
Для обеспечения посадки АО «ЦНИИАГ» была создана перспективная «Система автоматической/ автоматизированной посадки» (далее САП).
Общие сведения
САП создана в АО «ЦНИИАГ» на основе радиотехнической системы локальной навигации (РТСЛН).
Данная система является неавтономной и содержит блоки наземного и бортового оборудования.
САП обеспечивает:
- высокоточное определение координат воздушного судна с погрешностью до 1 м в указанной локальной области (аэродром, посадочная площадка, область мониторинга) размером до 100 км²;
- возможность получения как локальных, так и глобальных координат, что важно для посадки воздушного судна на движующуюся площадку (льдина, крейсер);
- высокую скорость передачи навигационной информации (до 100 Гц);
- определение углов ориентации воздушного судна и параметров воздушных сигналов;
- высокую надежность навигационных решений, обеспечиваемую комплексной обработкой информации от различных компонентов системы.
Состав бортовой и наземной аппаратуры СПА
Наземный сегмент (рис.1) представляет собой группу наземных компактных переносных радиомаяков (НРМ), состоящих из радиоэлектронного модуля с системой питания и антенного устройства, размещенного на 11-метровой телескопической мачте.
Установка НРМ на мачту необходима для обеспечения прямой видимости между переносным радиомаяком и бортовым оборудование на всем протяжении захода на посадку, движения по глиссаде, посадки и пробега по ВПП с учетом наличия в области установки наземного сегмента оборудования аэродромных построек, воздушных судов и естественного рельефа.
Развертывание наземной антенной системы, состоящий из порядка 4-8 НРМ занимает не более 1 часа на неподготовленный площадке.
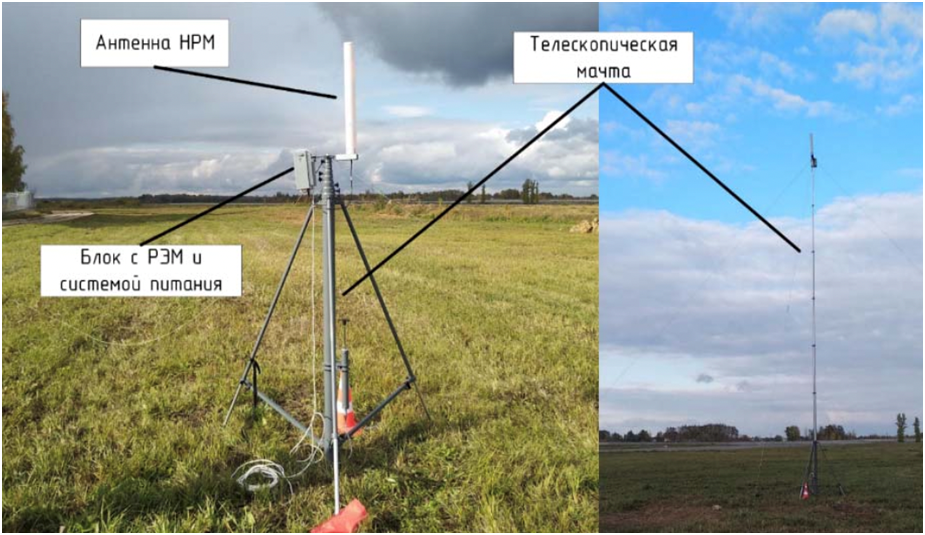
Рисунок 1. Наземный сегмент САП. НРМ.
Бортовой оборудование САП (рис. 2) включает представляет моноблок, который размещен на специальной установочной площадке в месте, наиболее близком к ребру жесткости ЛА, для исключения влияния дополнительных вибраций на инерциальный измерительный блок, антенное устройство, установленное под фюзеляжем ВС и индикатор, аналог HIS (Horizontal Situation Indicator).

Рисунок 2. Бортовой сегмент САП.
На рисунке 3 представлены индикаторы пилотажного оборудования. Они отображают отклонения в боковом и вертикальном каналах, сравнивая положение летательного аппарата с заданной траекторией снижения. Данное оборудование помогает пилоту обеспечить безопасную посадку, минимизируя отклонения от требуемой траектории.

Рисунок 3. Индикатор отклонений от траектории посадки системы САП.
В общем виде структурную схему САП представлена на рисунке 4.
Центральным элементом технологического комплекса является РТСЛН, которая является ключевой подсистемой САП. Бесплатформенная инерциальная система (БИНС) технологического комплекса базируется на инерциальном измерительном блоке АИСТ-350, собранном на основе микромеханических акселерометров и датчиков угловой скорости.
Алгоритм БИНС выполнен в вычислительном устройстве САП с использованием вычислителя Fastwel CPC-307. Система воздушных сигналов технологического комплекса основана на микробарометре Bosch BMP-280, который обладает достаточной относительной точностью для определения высоты замеренного уровня на ВПП при предполетной выставке. На малых высотах для определения геометрической высоты используется лазерный дальномер ДЛ-8. Для повышения удобства эксплуатации технологического комплекса инерциальный измерительный блок, радиоэлектронный модуль РТСЛН и вычислитель САП были объединены в моноблочном корпусе.

Рисунок 4. Структурная схема САП.
Исследования системы
Изучение качества и анализ точностных характеристик проводился на ВС Cessna-172 при неблагоприятных метеоусловиях.
Входе последующего сравнения с эталоном было выявлено, что на большей части траектории полета погрешности вдоль ВПП соответствовали требованиям, однако на участке воздействия помех, когда навигационное решение РТСЛН становится недоступным, допустимые погрешности были превышены. Использование БИНС даже с датчиками низкого класса точности, в сочетании с РТСЛН позволяет достичь требуемых для автоматической посадки.
Таким образом, в ходе эксперимента было выявлено, что точностоные характеристики САП на большей части траектории в 1,2 – 1,5 раза лучше требуемых.
Выводы
Таким образом, система автоматизированной посадки имеет следующие преимущества:
- Возможность обеспечение Арктических аэродромов средством посадки, которое значительно увеличит число воздушных перевозок в/из Арктической зоны.
- Малое время развертывания (до 1 часа на неподготовленной площадке) наземного сегмента;
- Возможность изменения конфигурации навигационного поля РТСЛН в зависимости от рельефа местности, наличия препятствий и требований к траектории снижения;
- Незначительный вес бортового оборудования (до 2 кг);
- Компактность наземного оборудования (от 4 до 8 блоков по 3 кг);
- Невысокая стоимость по сравнению с существующими инструментальными системами захода на посадку и посадки.
Использование данной системы повысит регулярность воздушного сообщения в Арктике, решит часть экономических и социальных проблем.
Список литературы
- Степанов О. А. Основы теории оценивания с приложениями к задачам обработки навигационной информации. Ч. 1. Введение в теорию оценивания. СПб.: ГНЦ РФ АО «Концерн «ЦНИИ «Электроприбор»,2010. 509 с.
- Черный М. А., Кораблин В. И. Воздушная навигация. М., 1992
- Соловьев Ю. А. Системы спутниковой навигации. М., 2000.
- Олянюк П. В., Астафьев Г. П., Грачев В. В. Радионавигационные устройства и системы гражданской авиации. М.,1983.
- В.В. Щербинин, Г.А. Кветкин, И.Л. Ажгиревич, А.В. Измайлов-Перкин «Экспериментальное исследование точностных характеристик системы автоматической посадки на основе радиотехнической системы локальной навигации для беспилотного летательного аппарата»

