
При проектировании устройств электронного управления электродвигателями постоянного тока нередко стоит задача предварительной проверки схемотехники для уточнения параметров электронных компонентов, оценки переходных процессов и процессов, происходящих при работе электропривода и системы управления в целом. Для этого используют различные системы моделирования и симуляции, что позволяет снизить конечную стоимость устройства, увеличить скорость разработки и уменьшить брак.
Для моделирования электронных систем удобно использовать программу Proteus. В данной работе будет рассмотрен пример моделирования Н-моста для управления двигателем постоянного тока [1].
Для реверсивного управления двигателем постоянного тока с возбуждением от магнитов постоянного тока и номинальным напряжением якоря 12В применяют Н-мост на биполярных или полевых транзисторах.
Применение такой схемы управления позволяет уменьшить габариты системы управления, а также сделать ее компактной для маломощных двигателей. Однако расчет транзисторов и резисторов на этапе проектирования является достаточно сложной задачей, так как многие параметры двигателя нам неизвестны. Для упрощения этой задачи можно прибегнуть к моделированию системы управления и предварительной оценки правильности проведенных расчетов. В качестве среды моделирования можно использовать Proteus – достаточно простой и удобной среды моделирования электронных цифровых схем [2].
На рисунке 1 представлена модель Н-моста на биполярных транзисторах
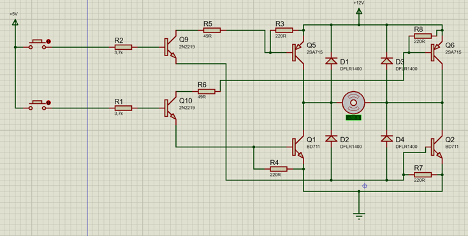
Рисунок 1. Н-мост на биполярных транзисторах
Для моделирования схемы управления в качестве примера рассмотрим двигатель постоянного тока мощностью  30Вт с напряжением якоря
30Вт с напряжением якоря  12В.
12В.
Управление Н-мостом предполагается управлять через Arduino, однако, максимальный ток дискретных выходов данного контроллера составляет максимум 15мА, следовательно, для управления силовыми ключами Q5, Q6, Q1, Q2 необходимо подобрать транзистор Q9 и Q10 с большим коэффициентом усиления.
Ток базы транзисторов Q5, Q6, Q1, Q2:

где  – коэффициент усиления транзистора по току,
– коэффициент усиления транзистора по току,

 – ток нагрузки А,
– ток нагрузки А,

Сопротивление базы транзисторов Q5, Q6, Q1, Q2:
здесь  – напряжение питания,
– напряжение питания,

 – падение напряжение на переходе эмиттер-база,
– падение напряжение на переходе эмиттер-база,

Ток базы транзисторов Q9 и Q10:

где – коэффициент усиления транзистора по току,


Сопротивление базы транзисторов Q9 и Q10:
здесь – напряжение питания,

Результаты моделирования представлены на рисунке 2.
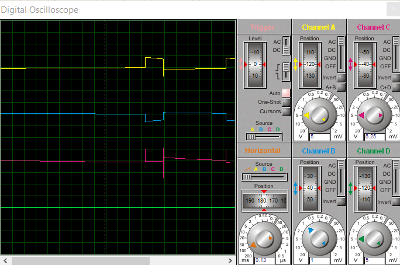
Рисунок 2. Результаты моделирования работы Н-моста
По рисунку 2 можно сделать вывод об адекватных расчетах электронных элементов Н-моста в первой итерации.
Следующим этапом проектирования системы управления двигателем является разработка схемотехники и трассировка платы [3].
На рисунке 3 представлена трассировка платы схемы управления.
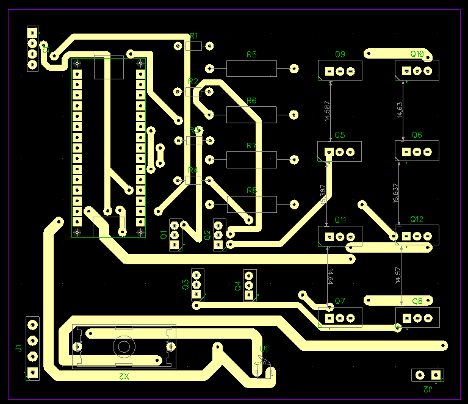
Рисунок 3. Трассировка платы управления
На рисунке 4 показана модель платы, которая позволяет визуально оценить расположение электронных компонентов на плате.
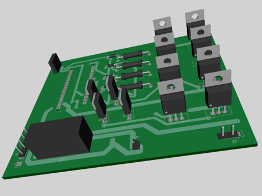
Рисунок 4. 3D-модель платы управления
Выводы: в данной работе рассмотрен процесс разработки платы управления электродвигателем постоянного тока с применением программ моделирования и симуляции, что позволило оценить работоспособность предложенной схемы. Полученные результаты моделирования могут в дальнейшем использоваться при создании подобных устройств.
Список литературы
- Акишин С. В. Принципы управления H-мостом на ключевых элементах // E-Scio. 2020. №1 (40)
- Тюрин С.Ф., Ковыляев Д.А., Данилова Е.Ю., Городилов А.Ю. Bзучение программирования микроконтроллеров в сапр proteus // Вестник Пермского университета. Серия: Математика. Механика. Информатика. 2021. №2 (53)
- Вичугова А.А., Яковлева Е.М. Использование сапр DipTrace для автоматизации проектирования печатных плат // Прикладная информатика. 2008. №6



