
В настоящее время для обеспечения регулярных и максимальной загруженности воздушного движения необходимо в наибольшей степени автоматизировать все процессы, связанные с ОрВД
Существенную роль для решения данной задачи играют автоматизированные системы управления.
Автоматизированные системы (АС) УВД — это человеко-машинные системы, которые производят сбор, хранение, обработку и предоставление всякой информации о движении самолетов.
АС УВД классифицируются по нескольким признакам, основными из которых является:
- Область применения
- Назначение
- Степень автоматизации
- Способ получения информации о параметрах движения
За последние несколько лет оборудование центром УВД стали автоматизированные системы, которые в своё время разделились на аэродромные, аэроузловые и районные. Актуальной АС УВД является информационно-вычислительной системой сетевого типа, главное свойство Открытость и однородность. Под открытостью в глубоком смысле понимается свойство адаптируемой системы к конкретным условиям эксплуатации, возможность расширения как состава технических средств в неё входящих, так и её функций. В зависимости от условий в качестве базовой аэродромно-районной АС УВД (АРАС УВД) может быть перенастроена как в районную, так и в аэродромную систему.
По назначению АС УВД могут подразделяться:
- Планирование ВД
- Непосредственно УВД
- Совмещённые
- Наземное движение
АРАС УВД необходима для гарантии безопасности полета, повышение экономичности и регулярности полетов ВС различных ведомств в районе аэроузла, на МВЛ путём автоматизации процессов текущего планирования, сбора, обработки информации и метеоинформации.
Таким образом, системы обязаны решать следующие задачи:
- Приём, обработка и отображение информации, в том числе радиопеленгационной, радиолокационной, справочной, вспомогательной, аэронавигационной, а также данные о техническом состоянии и режимах оборудования
- Обеспечение взаимодействия со соседними АС и комплектами УВД, метеокомплексами, а также с объектами и системами технического взаимодействия органов ЕС ОрВД
- Передача информации внешним юзерам по каналам авиационной наземной сети передачи данных
- Осуществление контроля и управления тех.состоянием оборудования
А также для решения всех выше перечисленных задач к данной системе предъявляется ряд требований:
- АРАС обязана гарантировать решение задач управления и обеспечения ВД в зонах ответственности центра УВД
- Постоянный радиолокационный контроль за движением самолетов в пределах зон видимости РЛС
- Обеспечивать максимальное количество сообщений о целях (не менее 1000)
- Обеспечивать приём, хранение, обработку планов ВД
- Обеспечивать радиосвязь
- Синхронизация всех систем и оборудования
Несмотря на все это, данная система должна обеспечивать высокий уровень надежности для решения поставленных задач, поэтому характеризуется следующими показателями:
- Наработка на отказ 6000ч
- Коэффициент готовности не менее 0.999
Типовая структура АРАС УВД (рисунок)
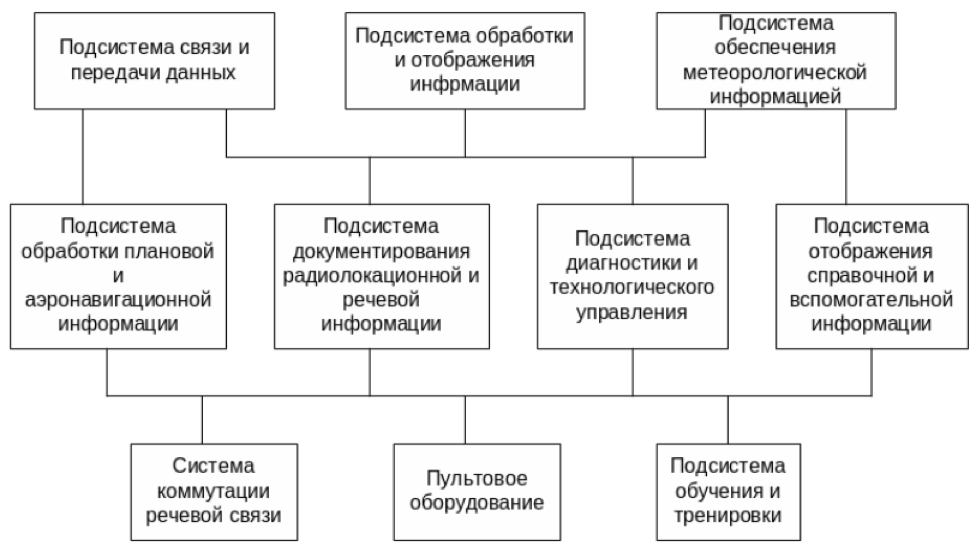
На рисунке отмечены следующие подсистемы:
- -Подсистема обработки и отображения информации
- -Подсистема связи и передачи данных о взаимодействии с источниками информации
- -Обеспечение Метео данных
- -система точного времени
- -обеспечение связи
- -предоставление радиолокационных данных
- -система автоматического зависимого наблюдения в вещательном диапазоне, учитывая транспондер и ЛП
АРАС работает благодаря аппаратурой технического управления и эффективными средствами контроля работоспособности модулей и элементов системы. Поэтому в случае отказов, система автоматически переключает основные отказавшие элементы на резервные.
Давайте отдельно рассмотрим такой момент, связанный с автоматизацией принятия решения, так как это функция Диспетчеров (органов УВД) играет важнейшую роль.
Все окончательно сводится к определённому алгоритму действий в сложившийся ситуации. Степень автоматизации АС УВД зависит от количества заложенных в систему уравнений. Реакция системы на сложившуюся ситуацию бывает 3 типов:
1.Сигнализация наступления события, выдаёт расчеты и параметры
2.Выдаёт рекомендации по действию диспетчера
3.Автоматическое действие самой системы для решения данной проблемы
Проблема предотвращения столкновений самолетов в воздушном пространстве имеет три фазы решения:
Первая фаза - обнаружение и сигнализация
Вторая фаза - вырабатывается алгоритм решения
Третья фаза - заключается в действии пилотов ВС
Что касаемо первой и второй фазы, то они могут производиться как с ВС, так с земли, но обязательно с применением автоматизированных средств наблюдения, связи и обработки информации
До того как не придумали бортовое оборудование, такое как TCAS, ACAS, единственным способом разрешения потенциальных конфликтных ситуаций было диспетчерское управление при радиолокационном контроле.
Нужно учесть такой момент, что диспетчер службы УВД при получении информации от пилота о выполнении какого-либо манёвра согласно рекомендациям системы TCAS обязан воздержаться от дачи каких-либо команд.
Таким образом, с помощью автоматизированные систем УВД и АС, находящихся на борту ВС облегчают воздушное движение с каждым годом, которое становится более безопасным и регулярным, несмотря то, что пассажиропоток растёт, значит и увеличивается количество ВС
Список литературы
- Сарайский Ю.Н – Аэронавигация
- Соколов О.А – АСУ



