
Двигатели постоянного тока (ДПТ) всё ещё широко используются, несмотря на конкуренцию со стороны бесколлекторных двигателей. У таких двигателей есть несомненные преимущества такие как: простота управления, высокий пусковой момент, точная регулировка скорости. Двигатели постоянного тока широко применяются в промышленности, робототехнике, электроприводах и других областях благодаря их высокой управляемости и надежности. Важнейшей задачей при работе ДПТ является обеспечение точного регулирования скорости вала, что достигается за счет использования многоуровневых систем управления, включающих контур тока и позиции.
Электродвигатель постоянного тока – это электрическая машина, которая преобразует электрическую энергию постоянного тока в механическую энергию вращения. Эти двигатели широко используются в различных областях, от бытовой техники до промышленного оборудования и транспорта, благодаря их регулируемости, простоте управления и хорошим характеристикам.
Машина постоянного тока имеет обмотку возбуждения, расположенную на явно выраженных полюсах статора. По обмотке возбуждения проходит постоянный ток Iв, который создает магнитное поле возбуждения Фв. На роторе размещена двухслойная обмотка, в которой при вращении ротора индуктируется э. д.с [1].
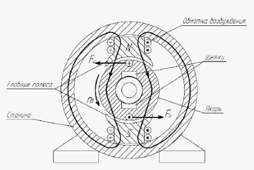
Рисунок 1. Электромагнитная схема ДПТ
При заданном направлении вращения якоря направление э.д.с, индуктируемой в проводниках, зависит только от того, под каким полюсом находится проводник. Поэтому во всех проводниках, расположенных под одним полюсом, направление э.д.с. одинаковое и сохраняется таким независимо от частоты вращения.
Система управления ДПТ.
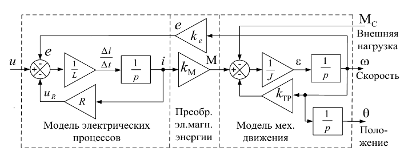
Рисунок 2. Структура модели ДПТ
Модель электрических процессов в R-L цепочке – это модель обмотки ротора: ![]()
e – это ЭДС, наводимая в обмотке ротора при вращении в магнитном поле статора [2]. В соответствии с законом Фарадея её величина пропорциональна скорости изменения магнитного потока, пронизывающего обмотку (то есть пропорциональна ω).
ЭДС в модели вычитается из входного напряжения u, так как индукционный ток в соответствии с правилом Ленца всегда имеет то направление, при котором ослабляется действие причины, возбуждающей этот ток.
Ток в обмотке ротора i, получаемый в модели интегрированием его производной, преобразуется в крутящий момент двигателя М.
Модель механического движения преобразует момент двигателя в частоту вращения его вала ω. В рассматриваемом случае она характеризуется моментом инерции ротора J, вязким трением c коэффициентом
Параметры движения привода связаны друг с другом:
- моментом двигателя постоянного тока при постоянном поле статора можно управлять, меняя ток ротора: M = f1(i);
- скоростью (угловой частотой) вала двигателя можно управлять, меняя его момент: ω = f2 (M).;
- положение вала можно изменять, управляя его скоростью (частотой вращения): θ = f3 (ω).
Такая взаимосвязь параметров приводит к мысли о применимости при управлении ими метода, называемого в автоматике подчинённым регулированием.
Список литературы
- Кириллов, А. В. Структура и принципы управления двигателем постоянного тока / А. В. Кириллов, Д. А. Степанюк, П. Н. Ясенев // Учебное пособие. – Екатеринбург: УрФУ, 2022. – 45 с.
- Антипов, А. О. Современные методы управления двигателем постоянного тока / А. О. Антипов // Приводная техника. – 2019. – № 2. – С. 19–25. – URL: https://privod.news/files/anti_2_19.pdf



