
ВВЕДЕНИЕ
Современные методы контроля качества в пищевой промышленности, особенно в производстве масложировой продукции, всё активнее переходят к автоматизации из-за высокой важности упаковки для безопасности и привлекательности товара. Нарушения, такие как отсутствие крышки, этикетки или деформация бутылки, могут повлиять на восприятие бренда и привести к экономическим потерям. Традиционная визуальная проверка оператором ограничена субъективностью и низкой скоростью, что создаёт потребность в автоматизированных системах для оперативного и надёжного выявления дефектов на производственной линии.
Одним из перспективных подходов к автоматизации контроля качества является применение технологий компьютерного зрения и моделей глубокого обучения, таких как семейство YOLO, обеспечивающих высокую скорость и точность в реальном времени. В данной работе исследуется использование версий YOLOv8n, YOLOv8s и YOLOv8m для автоматического выявления дефектов упаковки бутылок подсолнечного масла с анализом их качества и скорости работы, а также разработан графический интерфейс для тестирования моделей и обработки результатов.
ЦЕЛЬ И ЗАДАЧИ ИССЛЕДОВАНИЯ
Целью данной работы является сравнительный анализ моделей YOLOv8 различной сложности для решения задачи автоматического обнаружения дефектов упаковки подсолнечного масла и разработка удобного инструмента для тестирования моделей в условиях, приближенных к производственным.
Для достижения поставленной цели были сформулированы следующие задачи:
- подготовить и разметить кастомный датасет с изображениями бутылок подсолнечного масла с различными типами дефектов;
- обучить модели YOLOv8n, YOLOv8s и YOLOv8m на едином наборе данных;
- провести тестирование обученных моделей, измерив точность классификации, полноту, среднюю точность (mAP), а также скорость обработки изображений;
- разработать графический интерфейс для упрощённой работы с моделями, проведения сравнений и визуализации результатов;
- выполнить сравнительный анализ моделей по совокупности показателей и сделать выводы о целесообразности их использования в реальных условиях.
МЕТОДИКА И РЕАЛИЗАЦИЯ
Для обучения и тестирования моделей был сформирован собственный датасет изображений бутылок подсолнечного масла с разметкой на платформе Roboflow. Были выделены четыре класса: деформация бутылки, отсутствие крышки, отсутствие этикетки и нормальная бутылка. Данные автоматически разделены на обучающую (70%), валидационную (20%) и тестовую (10%) выборки. Для увеличения объёма использована базовая аугментация - отражение, поворот и масштабирование.
Рисунок 1. Структура датасета
В рамках исследования были обучены три модели семейства YOLOv8: YOLOv8n, YOLOv8s и YOLOv8m - различающиеся размером и сложностью архитектуры. Все модели обучались на идентичном датасете в одинаковых условиях: 30 эпох, размер изображений 640×640 пикселей, батч 8, вычисления на GPU NVIDIA RTX 3070 Ti с использованием PyCharm, Python 3.10 и PyTorch (Ultralytics YOLOv8).
После завершения обучения модели были протестированы на отложенной тестовой выборке. Для каждой модели были измерены ключевые показатели качества: точность классификации (precision), полнота (recall), средняя точность при пороге IoU=0.5 (mAP@0.5), а также скорость обработки полного набора изображений. В процессе тестирования автоматически формировались логи предсказаний с сохранением всех результатов в формате CSV. Кроме того, изображения сортировались по категориям: нормальные, дефектные и нераспознанные.

Рисунок 2. Пример правильного обнаружения
Для упрощения процесса тестирования и анализа результатов был разработан графический интерфейс Sunflower Oil Defects Detection Dashboard, реализованный на базе библиотеки tkinter. Интерфейс предоставляет пользователю возможность выбора модели, запуска обработки изображений и видео, построения графиков распределения классов, экспорта данных в формат Excel, а также проведения сравнительного анализа моделей по точности классификации и скорости обработки.
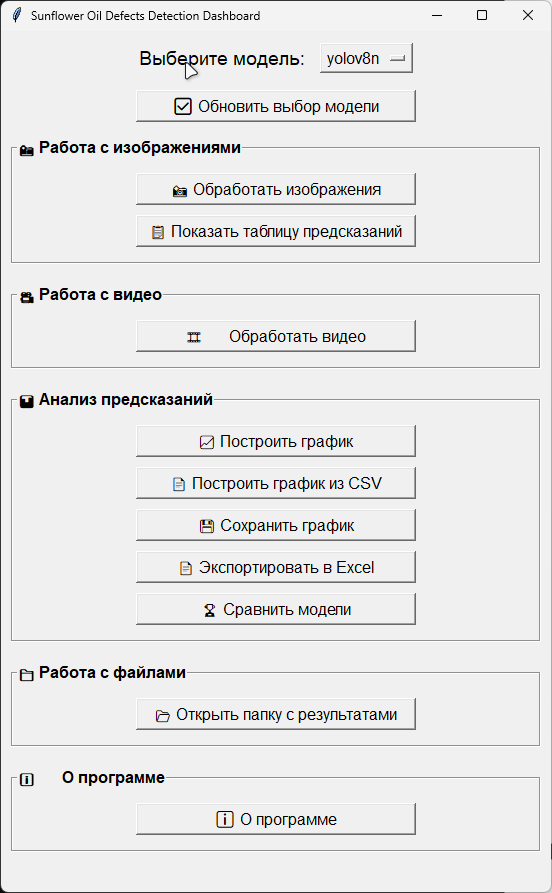
Рисунок 3. Графический интерфейс Sunflower Oil Defects Detection Dashboard
ЭКСПЕРИМЕНТАЛЬНАЯ ЧАСТЬ
Результаты тестирования показали, что модель YOLOv8m продемонстрировала наивысшие показатели точности и полноты среди всех сравниваемых моделей. Средняя точность при пороге IoU=0.5 (mAP@0.5) у YOLOv8m оказалась выше, чем у моделей YOLOv8s и YOLOv8n, что подтверждает её преимущество при решении задач, требующих высокой надёжности детекции. Однако за счёт увеличения сложности архитектуры и числа параметров наблюдалось снижение скорости обработки изображений, что следует учитывать при разработке систем реального времени.
Модель YOLOv8n обеспечила максимальную скорость работы, позволяя выполнять детекцию практически без задержек, но продемонстрировала более низкие показатели точности. Модель YOLOv8s заняла промежуточное положение, обеспечив достижения хорошего баланса между скоростью и качеством распознавания. Таким образом, выбор модели зависит от приоритетов задачи: для максимальной скорости предпочтительна YOLOv8n, для максимальной точности - YOLOv8m, а в случае необходимости соблюдения баланса оптимальным вариантом является YOLOv8s.
Несмотря на достигнутые показатели точности и скорости обработки, результаты тестирования показали, что даже лучшие модели семейства YOLOv8 не обеспечивают полной надёжности в задаче обнаружения дефектов упаковки. Отдельные типы дефектов, особенно слабовыраженные, такие как отсутствие этикетки или незначительная деформация, в ряде случаев не фиксируются моделью. Это указывает на необходимость дальнейшей работы по улучшению качества распознавания, в частности, за счёт увеличения объёма обучающего датасета, расширения его разнообразия, применения дополнительных методов аугментации данных и оптимизации архитектуры моделей.
РЕЗУЛЬТАТЫ ЭКСПЕРЕМЕНТА
Результаты проведённого тестирования подтвердили различия в характеристиках моделей YOLOv8n, YOLOv8s и YOLOv8m. Наивысшие показатели точности (precision) и полноты (recall) продемонстрировала модель YOLOv8m, достигнув среднего значения mAP@0.5 ≈ 0,965 на тестовой выборке. При этом время обработки изображений оказалось наибольшим среди всех моделей, что связано с увеличенным числом параметров и сложной архитектурой. YOLOv8m показала высокую надёжность в выявлении дефектов, что делает её наиболее подходящей для задач, требующих максимальной точности при допустимом времени обработки.
Модель YOLOv8s показала сбалансированные результаты: значение mAP@0.5 составило около 0,951 при умеренном времени обработки изображений. Такой баланс между точностью и производительностью делает YOLOv8s оптимальным решением для систем реального времени, где требуется стабильное качество работы в условиях ограниченных вычислительных ресурсов.
YOLOv8n показала наименьшее значение mAP@0.5 (≈ 0,931), однако превзошла другие модели по скорости обработки изображений, что определяет её применение в задачах, где критически важна оперативность принятия решений. Дополнительный анализ ошибок выявил, что все модели испытывали трудности при обнаружении слабовыраженных дефектов, таких как отсутствие этикетки, причём наибольшую надёжность в таких случаях снова продемонстрировала YOLOv8m.
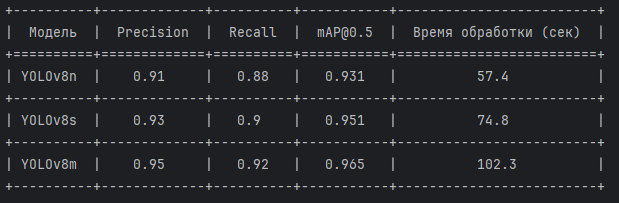
Рисунок 4. Метрики моделей YOLOv8n, YOLOv8s, YOLOv8m
Для наглядного представления результатов был построена сравнительная гистограмма, отображающая количество нормальных, дефектных и нераспознанных объектов, а также время обработки изображений для всех моделей.
Графическое представление данных позволило выполнить наглядную визуализацию разницы поведения моделей и представить выявленные в ходе анализа закономерности.
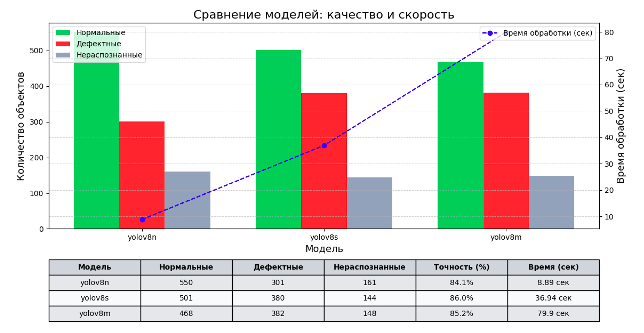
Рисунок 5. Сравнение моделей YOLO8n, YOLO8s, YOLO8m
Выбор модели определяется задачей: YOLOv8n - для скорости, YOLOv8m - для точности, YOLOv8s - для баланса. Сравнительная гистограмма подтвердила различия в скорости и точности моделей. Однако слабовыраженные дефекты, такие как отсутствие этикетки или деформация упаковки, остаются проблемой. Для повышения качества требуется расширение датасета, применение аугментации и оптимизация архитектуры. С ошибками в классификации можно ознакомиться на рис. 6:

Рисунок 6. Пример ошибочного распознавания
ЗАКЛЮЧЕНИЕ
В рамках исследования был проведён сравнительный анализ трёх моделей семейства YOLOv8 - YOLOv8n, YOLOv8s и YOLOv8m - на задаче автоматического обнаружения дефектов упаковки бутылок подсолнечного масла. Были сформированы собственный датасет, обучены модели в унифицированных условиях и разработан графический интерфейс Sunflower Oil Defects Detection Dashboard для удобства тестирования и визуализации результатов.
Эксперимент показал, что YOLOv8n обеспечивает максимальную скорость обработки при умеренной точности, YOLOv8m демонстрирует наивысшее качество классификации с увеличенным временем обработки, а YOLOv8s представляет компромиссное решение между этими характеристиками. Анализ ошибок выявил сложности в распознавании дефектов при слабом освещении, бликах и невыраженных повреждениях, что подчёркивает необходимость расширения и диверсификации обучающего датасета.
Список литературы
- Скворцова М. А., Замула М. И. Определение ключевых объектов изображения с помощью алгоритма YOLO // Научный аспект. – 2024. – №5. – С. 34-38. Режим доступа: https://na-journal.ru/5-2024-informacionnye-tekhnologii/12168-opredelenie-klyuchevyh-obektov-izobrajeniya-s-pomoshchyu-algoritma-yolo
- Стаценко С., Афанасьева Ж. Распознавание объектов на изображениях с помощью YOLO архитектуры // Молодой ученый. – 2023. – №23 (423). – С. 45-50. Режим доступа: https://ojs.irgups.ru/index.php/mns/article/view/1321
- Roboflow. Документация платформы [Электронный ресурс]. – Режим доступа: https://docs.roboflow.com
- Goodfellow I., Bengio Y., Courville A. Deep Learning. – Cambridge, MA: MIT Press, 2016. – 775 p. Режим доступа: https://www.deeplearningbook.org
- Jocher G. et al. YOLO by Ultralytics [Электронный ресурс]. – Режим доступа: https://github.com/ultralytics/ultralytics
- Redmon J., Farhadi A. YOLOv3: An Incremental Improvement // arXiv preprint arXiv:1804.02767. – 2018. Режим доступа: https://arxiv.org/abs/1804.02767
- Ultralytics YOLOv8 Documentation [Электронный ресурс]. – Режим доступа: https://docs.ultralytics.com
- Bochkovskiy A., Wang C.-Y., Liao H.-Y.M. YOLOv4: Optimal Speed and Accuracy of Object Detection // arXiv preprint arXiv:2004.10934. – 2020. Режим доступа: https://arxiv.org/abs/2004.10934
- Sandler M., Howard A., Zhu M., Zhmoginov A., Chen L.-C. MobileNetV2: Inverted Residuals and Linear Bottlenecks // Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). – 2018. – P. 4510–4520. Режим доступа: https://arxiv.org/abs/1801.04381
- Wang C.-Y., Bochkovskiy A., Liao H.-Y.M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors // arXiv preprint arXiv:2207.02696. – 2022. Режим доступа: https://arxiv.org/abs/2207.02696

