
ВВЕДЕНИЕ
Современные производственные предприятия всё чаще сталкиваются с необходимостью автоматизации процессов контроля качества продукции. В пищевой промышленности, в частности, в производстве масложировой продукции, высокие требования к качеству упаковки обусловлены как нормативными документами, так и ожиданиями потребителей. Одним из перспективных решений является использование методов компьютерного зрения и алгоритмов глубокого обучения для автоматического выявления дефектов упаковки в реальном времени.
ЦЕЛЬ И ЗАДАЧИ ИССЛЕДОВАНИЯ
Целью данной работы является разработка метода автоматического обнаружения дефектов бутылок подсолнечного масла с использованием YOLOv8. В рамках исследования решались следующие задачи:
- формирование и разметка датасета;
- обучение модели YOLOv8 на кастомном датасете;
- проведение тестирования и оценка точности модели;
- анализ ошибок классификации и предложений по улучшению.
МЕТОДИКА И РЕАЛИЗАЦИЯ
В работе использована модель YOLOv8n, обученная на кастомном датасете из 945 изображений. Разметка осуществлялась с использованием сервиса Roboflow, выделены 4 класса: deformed, no_label, no_lid, normal. Обучение производилось с параметрами: 30 эпох, размер изображения 640x640 пикселей, размер батча 8, устройство — GPU NVIDIA RTX 3070 Ti. Среда разработки — PyCharm, язык — Python 3.10.0. Обработка изображений выполнялась через библиотеку OpenCV, обучение — с использованием PyTorch и Ultralytics YOLOv8.
ИСПОЛЬЗОВАНИЕ ПЛАТФОРМЫ ROBOFLOW ДЛЯ ПОДГОТОВКИ ДАТАСЕТА
Качественная подготовка датасета является важнейшим этапом в построении эффективной системы компьютерного зрения. Для разметки и предварительной подготовки изображений в рамках данной работы была использована специализированная онлайн-платформа Roboflow, которая предоставляет удобные инструменты для аннотирования изображений, управления проектами и экспорта данных в форматах, совместимых с различными архитектурами нейронных сетей, включая YOLO.
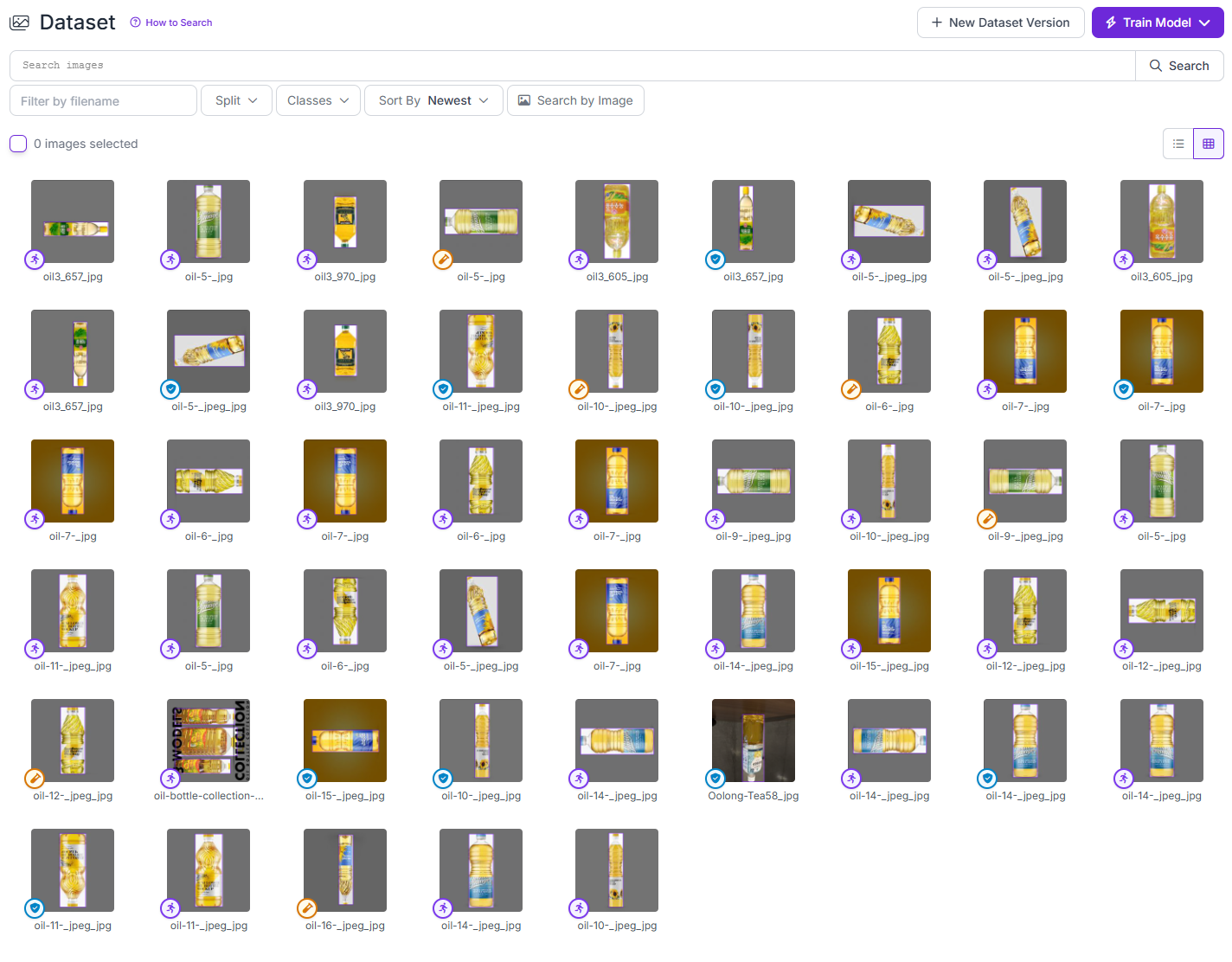
Рисунок 1. Dataset в Roboflow
Процесс разметки включал в себя загрузку изображений с бутылками подсолнечного масла и ручное выделение объектов с присвоением соответствующих классов дефектов. В рамках проекта были определены следующие классы:
- deformed — деформация бутылки;
- no_lid — отсутствие крышки;
- no_label — отсутствие этикетки;
- normal — бутылка без дефектов.
После завершения аннотирования все изображения были автоматически разделены платформой Roboflow на три выборки:
- обучающая (train) — 478 изображений;
- валидационная (valid) — 136 изображений;
- тестовая (test) — 68 изображений.
Распределение по классам выглядело следующим образом:
- deformed: 151 экземпляр;
- no_label: 301 экземпляр;
- no_lid: 157 экземпляров;
- normal: 301 экземпляр.
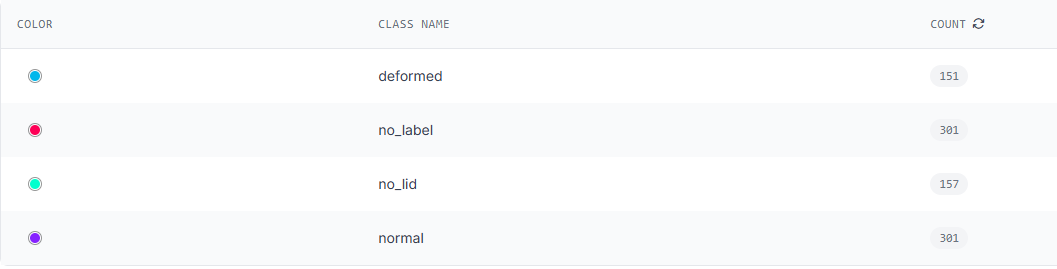
Рисунок 2. Классы датасета в Roboflow
Платформа также позволила провести базовую аугментацию изображений (повороты, отражения, масштабирование) и сформировать выходной набор данных в формате, полностью совместимом с YOLOv8 (включая структуру папок train/, valid/, test/ и файл конфигурации data.yaml).
Преимуществом использования Roboflow стало значительное сокращение времени на разметку, удобный визуальный контроль аннотаций, а также простота экспорта и интеграции подготовленного датасета в процесс обучения модели.
ОБУЧЕНИЕ МОДЕЛИ YOLOV8 НА КАСТОМНОМ ДАТАСЕТЕ
Для решения задачи автоматического обнаружения дефектов бутылок подсолнечного масла использовалась модель YOLOv8, относящаяся к современным алгоритмам объектного детектирования с высокой скоростью и точностью работы. В качестве базовой была выбрана версия YOLOv8n с минимальным числом параметров и быстрой сходимостью, оптимальной для прототипирования и работы при ограниченных ресурсах. Обучение модели проводилось на кастомном датасете, размеченном в Roboflow.
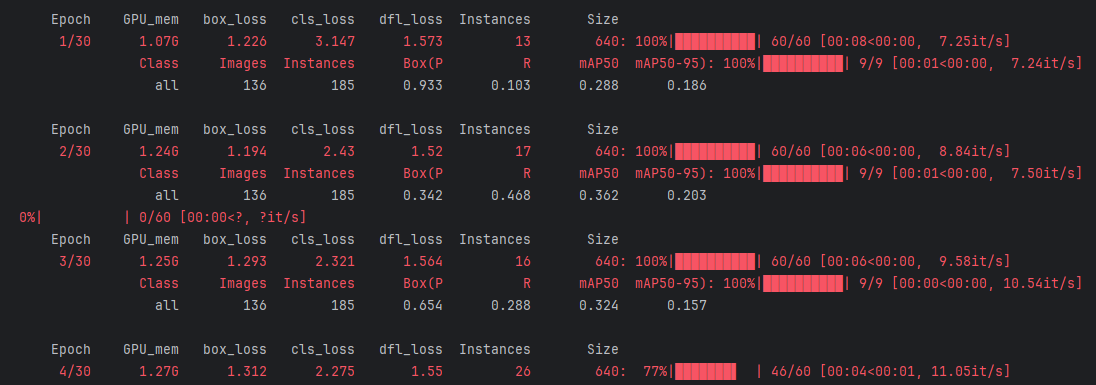
Рисунок 3. Процесс обучения
Обучение проходило стабильно, модель успешно достигала сходимости, показатели потерь снижались с каждой эпохой. Однако в процессе анализа стало очевидно, что достигнутые на валидации метрики не всегда отражают поведение модели в реальных условиях. Это стало поводом для дальнейшего тестирования и анализа ошибок, представленного в следующем разделе.
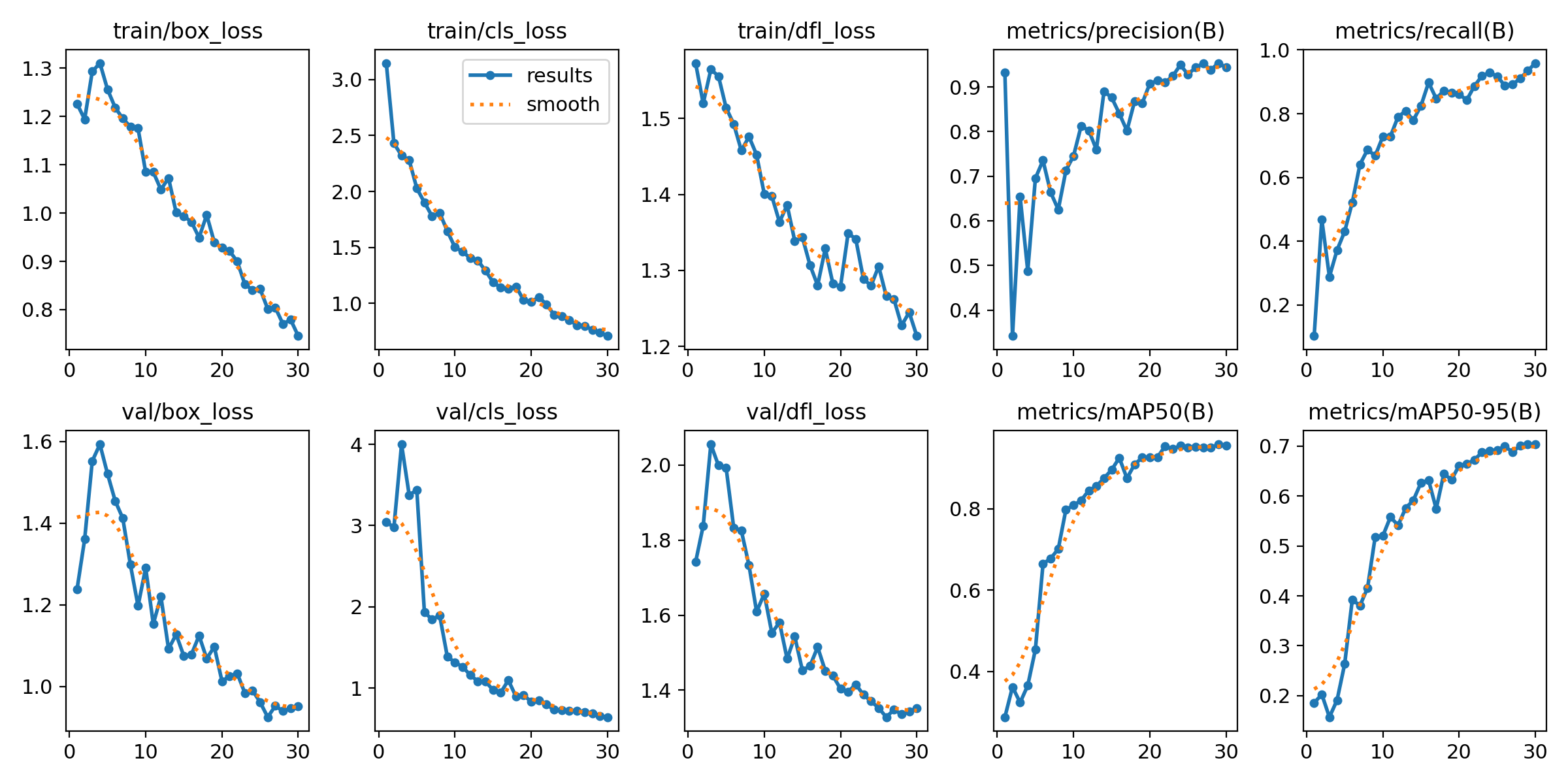
Рисунок 4. Метрические результаты
РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТА
По завершении 30 эпох обучения была проведена валидация модели на отложенной выборке, содержащей 136 изображений. Используемая архитектура YOLOv8n продемонстрировала высокие значения метрик качества, свидетельствующие о хорошей сходимости и способности модели к обобщению: точность (precision) составила 0.944, полнота (recall) — 0.959, средняя точность по всем классам при пороге IoU=0.5 (mAP@0.5) достигла 0.955, а строгая метрика mAP@0.5:0.95 — 0.704.

Рисунок 5. Результаты обучения
Наивысшие показатели точности и полноты модель продемонстрировала для классов «деформация» и «нормальная бутылка», что связано с наличием ярко выраженных визуальных признаков, легко различимых на изображениях. В то же время класс «отсутствие этикетки» оказался наиболее проблемным: при высокой полноте (0.969) точность составила лишь 0.855, что свидетельствует о склонности модели к ложным срабатываниям. Такая ошибка обусловлена слабой выраженностью дефекта — этикетка может сливаться с фоном по цвету или фактуре, особенно при неудачных условиях освещения или наличии бликов.
Дополнительное тестирование на изображениях, не участвовавших в обучении, подтвердило высокую способность модели к распознаванию дефектов, однако выявило и ряд типичных ошибок. На отдельных примерах нормальные бутылки ошибочно классифицировались как дефектные, либо явные дефекты оставались нераспознанными. Такие случаи чаще всего наблюдались при нестандартных ракурсах съёмки, недостаточном уровне освещённости, сильных отражениях на поверхности бутылок или визуальной неоднозначности структуры дефекта.

Рисунок 6. Пример правильного распознавания
Анализ ошибок показал, что модель недостаточно устойчива к условиям, отличающимся от обучающего набора, что указывает на необходимость дообучения, расширения выборки и возможного перехода к более сложной архитектуре. При этом достигнутые результаты валидации подтверждают работоспособность предложенного подхода и перспективность его дальнейшего развития.

Рисунок 7. Пример ошибочного распознавания этикетки
АНАЛИЗ ОШИБОК И ПУТИ УЛУЧШЕНИЯ
Несмотря на высокие показатели точности, достигнутые в ходе обучения модели YOLOv8, практическое применение выявило ряд ограничений. Во время тестирования на дополнительных изображениях, не входящих в тренировочную и валидационную выборки, модель продемонстрировала нестабильность в следующих условиях:
- нестандартный ракурс съёмки;
- сложный или шумный фон;
- наличие бликов и отражений на упаковке;
- неравномерное или слабое освещение;
- визуально малозаметные дефекты, сходные по цвету и текстуре с поверхностью бутылки.
В ряде случаев наблюдались ложные срабатывания (ошибочная классификация нормальной бутылки как дефектной) и пропуски явных дефектов, особенно в классах «отсутствие этикетки» и «отсутствие крышки», где признаки выражены слабо. Для повышения надёжности модели необходимо увеличить объём тренировочных данных, расширив выборку за счёт изображений с разными ракурсами, фонами и условиями освещения, что позволит улучшить её обобщающую способность.
Также имеет смысл дополнительно разметить изображения, полученные непосредственно в производственной среде, например, с помощью видеосъёмки конвейера, и использовать эти данные для дообучения модели. Это позволит приблизить поведение нейросети к реальным условиям эксплуатации.
При слабой выраженности дефектов рекомендуется использовать более мощные версии архитектуры, такие как YOLOv8s или YOLOv8m, обладающие лучшей способностью выявлять сложные паттерны. Дополнительное улучшение может быть достигнуто за счёт применения методов обработки изображений — коррекции освещённости, усиления контрастности и подавления шумов, что повышает читаемость объектов. Перспективным направлением также является адаптация модели к работе с видеопотоком, позволяющая учитывать временной контекст и снижать вероятность пропуска дефектов.
ПРАКТИЧЕСКАЯ ЗНАЧИМОСТЬ
Разработанная система автоматического контроля качества упаковки на базе модели YOLOv8 представляет собой перспективное решение для реального производства, обеспечивая детекцию дефектов в режиме реального времени и позволяя снижать потери за счёт оперативного устранения брака. Однако тестирование выявило, что в сложных условиях (слабое освещение, нестандартные ракурсы, слабовыраженные дефекты) модель работает недостаточно стабильно, что требует доработки: расширения обучающего датасета, повышения устойчивости и адаптации к потоковой обработке видео. При этом система обладает высокой гибкостью и может быть масштабирована на другие типы продукции при наличии соответствующей разметки и дополнительного обучения, что открывает перспективы её применения на предприятиях различных отраслей промышленности.
ЗАКЛЮЧЕНИЕ
В ходе проведённого исследования была разработана и реализована система автоматического обнаружения дефектов упаковки подсолнечного масла на основе технологии компьютерного зрения и архитектуры YOLOv8. Предложенный метод показал высокую эффективность при решении задачи детекции типичных видов брака, таких как отсутствие крышки, отсутствие этикетки и деформация бутылки. Обучение модели проводилось на кастомном датасете, сформированном и размеченном с использованием платформы Roboflow, а для валидации были получены обнадёживающие значения ключевых метрик: mAP@0.5 составил 0.955, а точность и полнота превысили 94%.
Тем не менее, результаты практического тестирования выявили определённые ограничения модели, связанные с ошибками при работе в нестандартных условиях: слабом освещении, ракурсных искажениях и наличии визуального шума. Это подчёркивает необходимость дальнейшего дообучения и повышения устойчивости модели за счёт расширения и разнообразия обучающей выборки.
В перспективе планируется увеличение объёма и сложности тренировочного датасета, переход к более мощным версиям модели (YOLOv8s/m), внедрение методов предварительной обработки изображений и поддержка видеопотока с производственной линии. Реализация этих шагов позволит повысить точность распознавания дефектов в реальных условиях и приблизить систему к промышленному внедрению.
Список литературы
- Скворцова М. А., Замула М. И. Определение ключевых объектов изображения с помощью алгоритма YOLO // Научный аспект. – 2024. – №5. – С. 34-38. Режим доступа: https://na-journal.ru/5-2024-informacionnye-tekhnologii/12168-opredelenie-klyuchevyh-obektov-izobrajeniya-s-pomoshchyu-algoritma-yolo
- Стаценко С., Афанасьева Ж. Распознавание объектов на изображениях с помощью YOLO архитектуры // Молодой ученый. – 2023. – №23 (423). – С. 45-50. Режим доступа: https://ojs.irgups.ru/index.php/mns/article/view/1321
- Roboflow. Документация платформы [Электронный ресурс]. – Режим доступа: https://docs.roboflow.com
- Goodfellow I., Bengio Y., Courville A. Deep Learning. – Cambridge, MA: MIT Press, 2016. – 775 p. Режим доступа: https://www.deeplearningbook.org
- Jocher G. et al. YOLO by Ultralytics [Электронный ресурс]. – Режим доступа: https://github.com/ultralytics/ultralytics
- Redmon J., Farhadi A. YOLOv3: An Incremental Improvement // arXiv preprint arXiv:1804.02767. – 2018. Режим доступа: https://arxiv.org/abs/1804.02767



