
Введение
Промышленные роботы являются сложными мехатронными системами, где электроприводы играют ключевую роль в обеспечении точного и динамичного движения [1, c.130]. Эффективность робота напрямую зависит от качества системы управления электроприводами (СУЭП). Для обеспечения оптимального управления этими приводами используется параметрический синтез. Параметрический синтез СУЭП представляет собой процесс определения оптимальных значений параметров регуляторов для достижения желаемых характеристик системы [4, c.36].
Цели и критерии синтеза
Основными целями параметрического синтеза СУЭП промышленных роботов являются:
- Высокая точность позиционирования: минимизация ошибки слежения за заданной траекторией.
- Быстродействие: достижение минимального времени переходного процесса при сохранении устойчивости.
- Энергоэффективность: минимизация энергопотребления приводами.
- Робастность: обеспечение работоспособности системы при наличии возмущений и неопределенностей.
Для достижения этих целей применяются различные критерии оптимизации, такие как:
- Интегральный критерий качества (ISE, ITAE, ITSE)
- Модульный критерий
- Критерий минимума времени регулирования
- Критерий устойчивости (запас по фазе и амплитуде)
Методы параметрического синтеза
Существует несколько методов параметрического синтеза, которые могут использоваться для проектирования систем управления электроприводами промышленных роботов [3, c.167-168]. Наиболее распространенные методы включают:
1. Метод корневого годографа: Этот метод использует геометрическое представление корней характеристического уравнения замкнутой системы для определения параметров регулятора.
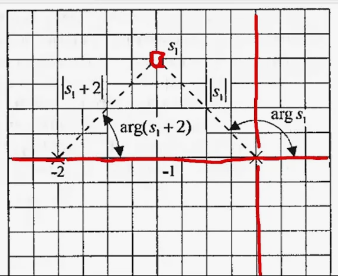
Рисунок 1. Угловой критерий корневого годографа.
2. Метод частотной области (метод Гольдфарба): Этот метод анализирует частотную характеристику разомкнутой системы для определения параметров регулятора.
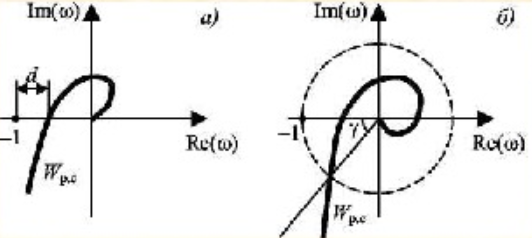
Рисунок 2. Частотные методы: а – запас устойчивости по модулю; б – запас устойчивости по фазе.
3. Метод состояния: Этот метод использует модель состояния системы для определения параметров регулятора путем решения системы дифференциальных уравнений.
Особенности синтеза СУЭП промышленных роботов
При синтезе СУЭП промышленных роботов необходимо учитывать ряд специфических особенностей [2, c.101]:
- Нелинейность: динамика электроприводов и механических передач имеет нелинейный характер, что усложняет процесс моделирования и синтеза.
- Связанность: движения отдельных звеньев робота взаимосвязаны, что требует учета динамического взаимодействия приводов.
- Изменяемость параметров: параметры робота могут меняться в процессе работы, например, из-за изменения нагрузки или износа механизмов.
Заключение
Параметрический синтез СУЭП промышленных роботов является сложной задачей, требующей применения современных методов моделирования, оптимизации и искусственного интеллекта [4, c.278]. Оптимальный выбор параметров регуляторов позволяет достичь высокой точности, быстродействия, энергоэффективности и робастность системы управления, что в конечном итоге повышает производительность и эффективность промышленных роботов.
Список литературы
- Егоров, И. Н. Системы управления электроприводов технологических роботов и манипуляторов: учеб. пособие / И. Н. Егоров, В. П. Умнов; Владим. гос. ун-т им. А. Г. и Н. Г. Столетовых. – Владимир: Изд-во ВлГУ, 2022. – 314 с.
- Самосейко В. Ф. Теоретические основы управления электроприводом / В. Ф. Самосейко. - СПб.: Элмор, 2007. - 464 с.
- Саушев А. В. Методы и алгоритмы параметрического синтеза технических систем на основе областей работоспособности / А. В. Саушев // Международный научно-исследовательский журнал. - 2016. - № 5-3 (47). - С. 167-168. DOI: 10.18454/IRJ.2016.47.090
- Саушев А. В. Параметрический синтез электротехнических устройств и систем / А. В. Саушев. - СПб.: ГУМРФ им. адм. С. О. Макарова, 2013. - 315 с.



