
Индукционный магнитный датчик используется для измерения магнитного курса — угла, заключённого между северным направлением магнитного меридиана и продольной осью самолёта. Этот датчик также может входить в различные курсовые системы.
Принцип действия датчика основан на использовании магнитного поля Земли. Чувствительным элементом является так называемый магнитный зонд, который представляет собой два параллельных пермаллоевых сердечника, лежащих в одной горизонтальной плоскости. Каждый сердечник имеет первичную обмотку, питающуюся переменным напряжением. Обмотки намотаны таким образом, чтобы магнитные потоки в обоих стержнях в любой момент времен были равны по модулю и противоположны по направлению. Из этого вытекает, что суммарный магнитный поток от двух первичных обмоток будет всегда равняться нулю.
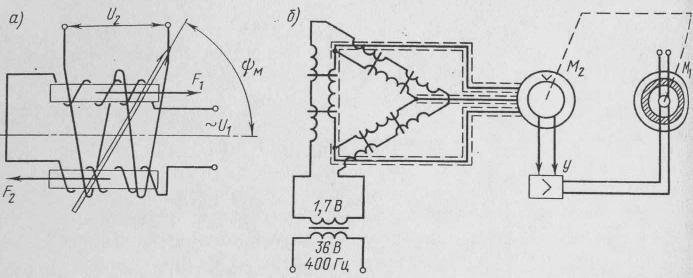
Рис. 1. Магнитный зонд
Если напряжение велико, то магнитная индукция имеет место перенасыщения. А при повышении магнитной индукции, падает уже магнитная проницаемость. Стоит отметить, что горизонтальная составляющая магнитного поля Земли проникает в сердечники датчика только тогда, когда магнитная проницаемость будет больше нуля.
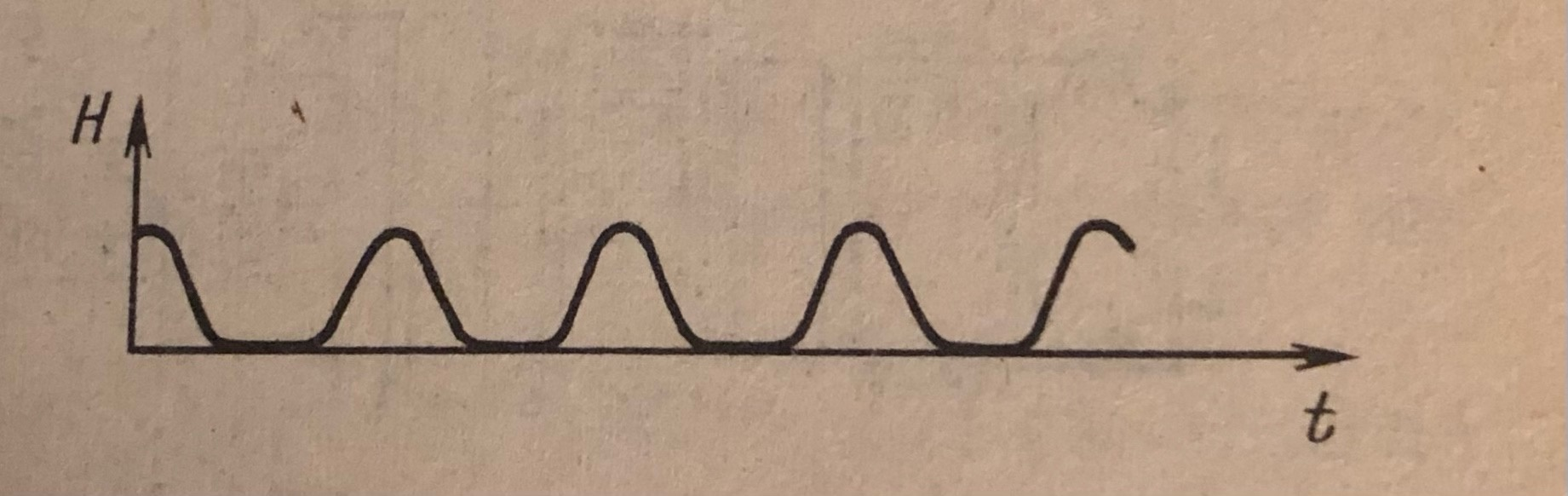
Рис. 2. Зависимость горизонтальной составляющей магнитного поля Земли от времени
Магнитное поле Земли из постоянного тока превратилось в пульсирующее определённого направления. Поскольку магнитное поле Земли изменяется в стержнях от нуля до какого-то определённого максимума, то можно представить скорость изменения магнитного потока в виде следующего графика.
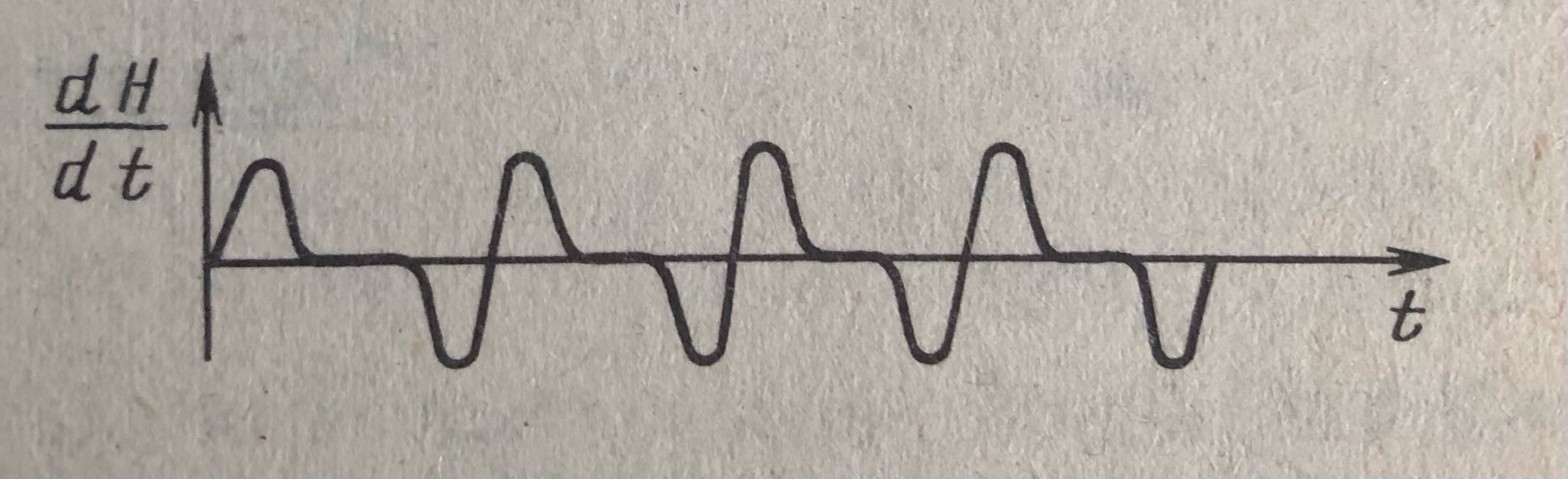
Рис. 3. Зависимость магнитного потока Земли от времени
Теперь запишем формулу напряжения переменного тока вторичной обмотки, который создаст магнитный поток:
Из этого уравнения нельзя сразу определить магнитный курс. Поэтому применяют так называемый компенсационный способ измерения. Для этого вместо одного магнитного зонда берут три и располагают их в пространстве относительно друг друга под углом 120º. Магнитное поле Земли будет наводить неодинаковые ЭДС. Результирующее магнитное поле будет соответствовать направлению горизонтальной составляющей магнитного поля Земли.
Такая схема позволяет преобразовать сигнал, поступающий с индукционного датчика, в угол поворота двигателя, который пропорционален магнитному курсу.
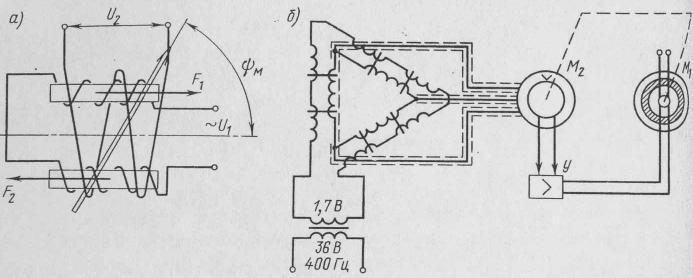
Рис. 4. Схема индукционного датчика
Теперь рассмотрим конструкцию индукционного датчика. В нём магнитные зонды с поплавком (он жёстко связан с зондами) перемещаются в кардановом подвесе, который заполнен специальной жидкостью. Жидкость, поплавок и кардановый подвес обеспечивают примерную горизонтальность зондов при кренах воздушного судна. При этом уменьшается погрешность от вертикальной составляющей магнитного поля Земли. А для компенсации полукруговой девиации служит специальный девиационный прибор, который располагается на крышке.
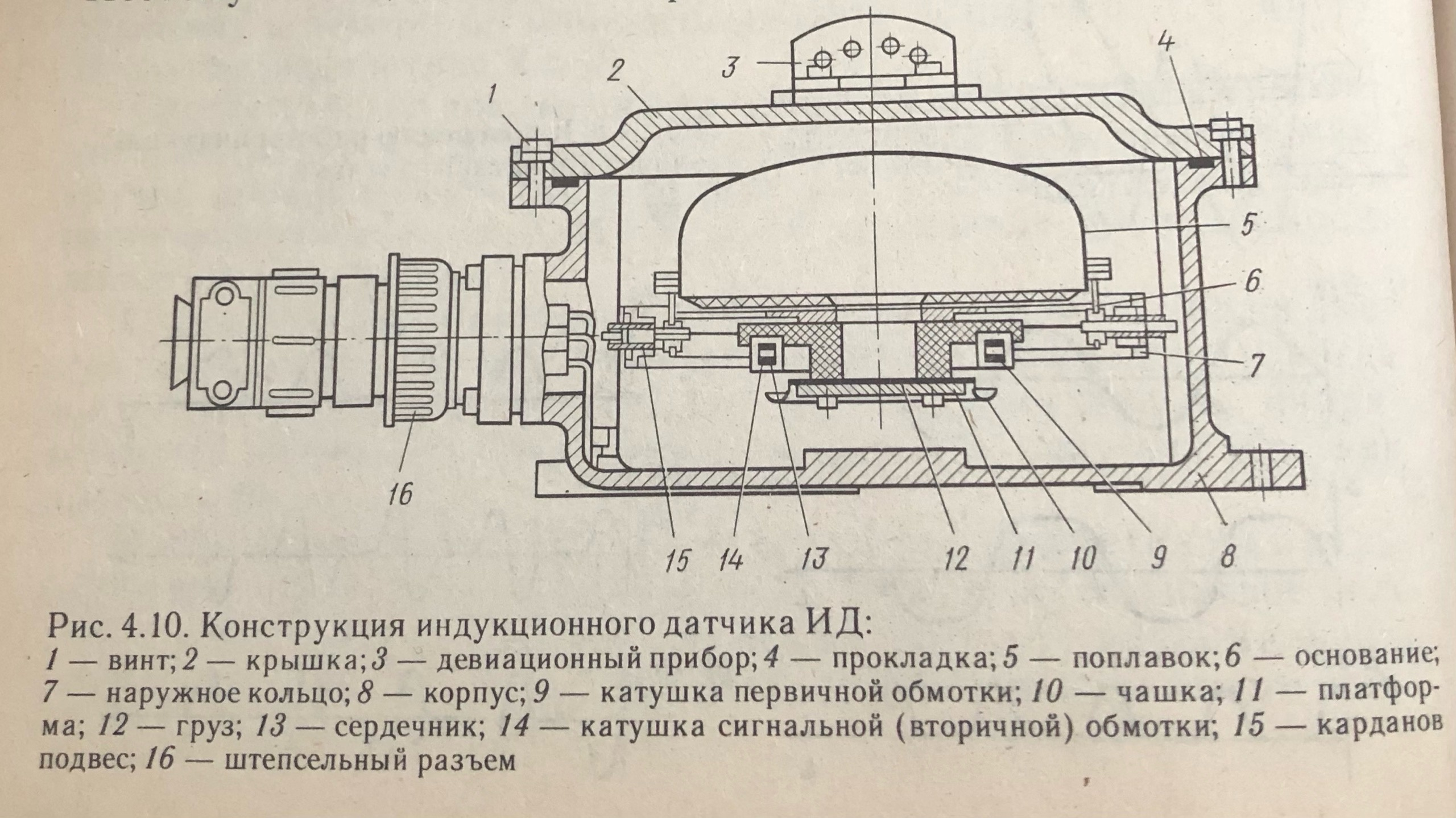
Рис. 5. Конструкция индукционного датчика
Индукционный датчик — более совершенный магнитный измеритель, поскольку за счёт его большой чувствительности в нём отсутствуют погрешности картушки, а с помощью специального коррекционного механизма можно легко устранять девиацию. Точность определения магнитного курса таким способом составляет примерно ±1,5°.
Список литературы
- Фёдоров С. М., Михайлов О. И., Сухих Н. Н. Бортовые информационно-управляющие системы: Учеб. для вузов; Под ред. С. М. Фёдорова. — М.: Транспорт, 1994. — 262 с.



