
Всенаправленный азимутальный радиомаяк АРМ – вид радионавигационной системы, предназначенной для определения местоположения воздушного судна.
Радиомаячная угломерная система VOR (Very High Frequency Omnidirectional Range) состоит из наземного оборудования (непосредственно сам радиомаяк VOR) и бортового оборудования летательного аппарата, принимающего сигналы от радиомаяка.
Данная система предназначена:
– для определения воздушным судном азимута радиомаяка;
– для определения курсового угла радиомаяка;
– для самолётовождения по заданному азимуту;
– для определения местоположения воздушного судна по азимутам двух радиомаяков VOR;
– для коррекции навигационных вычислителей;
– для прослушивания сигналов опознавания маяка или сигналов речевой связи.
Станция VOR передаёт в эфир позывные и информацию, которая позволяет бортовым радионавигационным системам определить угловое положение относительно станции. Данные с двух станций VOR или сочетание информации VOR с данными DME (Distance Measuring Equipment), всенаправленного дальномерного радиомаяка (ДРМ), позволяют однозначно определить местоположение летательного аппарата. Сама система VOR/DME относится к системам ближней навигации СБН.
СБН действует в зоне, в пределах которой возможно принять сигнал с наземного радиомаяка УКВ диапазона. На высотках полёта порядка 10 км диаметр такой зоны, называемый также дальностью прямой видимости, не превышает 420 км. В основу СБН положено определение азимута и дальности до наземного радиомаяка или радионавигационной точки РНТ. Угломерно-дальномерные СБН по виду информационного параметра относятся к временным (импульсным) и фазовым радионавигационным системам.
Система VOR использует частоты УКВ диапазона (108,0 – 117,95 МГц, длина волны 3 м.). Частоты радиомаяков кратны 0,05 МГц, например 109,05 МГц, 115,60 МГц и т.д. Однако часто используются частоты, которые кратны 1/10 мегагерца, и тогда справедливо такое обозначение частоты: 115,5 МГц вместо 110, 50.
Особенностью использования системы VOR является то, что часть указанного диапазона (а конкретно от 108 до 111,95 МГц) одновременно используется другой навигационной системой – радиомаячной системой посадки ILS (Instrument Landing System). Чтобы не происходило перекрытие используемых частот, у VOR первая цифра частоты после запятой всегда чётная (например, 110,40 МГц), в то время как у ILS такая цифра нечётная (например, 119,55 МГц). Стоит отметить, что эту часть диапазона занимают только аэродромные радиомаяки системы VOR. Остальная часть диапазона ( от 112 до 117,95 МГц) занята трассовыми радиомаяками системы VOR, частоты которых могут любыми, кратные при этом 50 кГц.
Принцип действия VOR основан на сравнении фаз сигналов, принятых из поля излучения наземного маяка.
Наземный радиомаяк VOR формирует поле излучения с помощью двух антенн: направленной и ненаправленной.
На рис. 1 представлены диаграммы направленности антенн радиомаяка VOR.
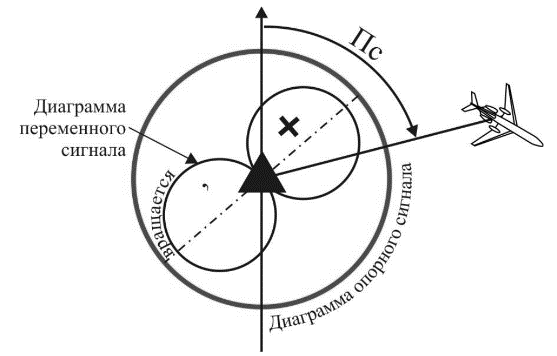
Рис. 1 Диаграммы направленности антенн радиомаяка VOR
На рис. 2 представлены временные диаграммы сигналов, отражающие работу VOR.
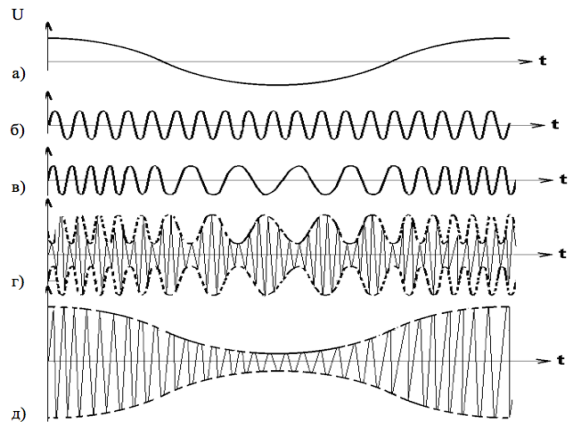
Рис. 2 Временные диаграммы сигналов, отражающие работу радиомаяка VOR
Ненаправленная антенна маяка VOR излучает высокочастотный сигнал (рис. 2, г), промодулированный по амплитуде поднесущей частоты 10 кГц. Этот сигнал, в свою очередь, промодулирован по частоте синусоидой с частотой 30 Гц (рис. 2, а и в) и называется опорным (reference) сигналом. Фаза огибающей сигнала остаётся постоянной в любой точке и не зависит от положения самолёта относительно радиомаяка.
Диаграмма направленности направленной антенны имеет форму «восьмёрки». Если бы ориентация в пространстве диаграммы направленности антенны оставалась неизменной, то амплитуда принимаемого сигнала была бы постоянной в любом направлении прихода этого сигнала и зависела бы только от угла между направлением на данную точку и направлением оси антенны.
Однако данная диаграмма вращается вокруг вертикальной оси. Скорость её вращения 30 оборотов в секунду, что соответствует 30 Гц, причём вращается непосредственно сама диаграмма, а антенна остаётся неподвижной. Именно вращение диаграммы направленности приводит к тому, что сигнал амплитудно модулируется частотой 30 Гц (рис. 2, д), то есть его амплитуда в любой точке пространства изменяется с заданной частотой. Такой сигнал называется переменным (variable) сигналом. Вращение диаграммы приведёт также к тому, что максимум амплитуды всегда будет проходить через разные направления, поэтому фаза огибающей будет отличаться в зависимости от направления.
Радиомаяк системы VOR регулируется так, что фазы опорного и переменного сигналов совпадают в направлении на магнитный север. В любом другом направлении сигналы оказываются сдвинутыми по фазе, причём фаза переменного сигнала от фазы опорного сигнала, а величина сдвига фаз равняется величине угла между направлением на магнитный север и данным направлением. Измеряя данную величину отставания, можно определить азимут.
Бортовое оборудование летательного аппарата принимает смешанный сигнал от радиомаяка, так как опорный и переменный сигналы складываются, однако из-за того, что для формирования этих сигналов используются различные виды модуляции, оборудование способно их разделить. Оно вычисляет сдвиг, выраженный в градусах, между фазами огибающих, который является пеленгом летательного аппарата относительно меридиана, проходящего через радиомаяк.
Погрешность системы VOR около 5°. Такая низкая точность обуславливается значительным влиянием сигналов, которые отражаются от местных объектов.
Для уменьшения погрешности стандартные VOR постоянно совершенствуются или заменяются более сложными (например, доплеровскими), погрешность которых всего 0,5°.
Система PVOR (Precision VOR) является более развитой системой по сравнению VOR. Диаграмма направленности радиомаяков данной системы имеет несколько лепестков. Однако наличие нескольких лепестков может привести к неоднозначности определения пеленга. Побороться с неоднозначностью можно за счёт применения двух каналов измерения пеленга: грубого и точного. За счёт такого технического решения обеспечивается более точное и помехоустойчивое определение пеленга.
В допплеровских VOR (Doppler VOR (DVOR)) переменный сигнал промодулирован по частоте, а опорный – по частоте. Инверсия вида модуляций способствует уменьшению влияния помех от объектов, находящихся рядом с радиомаяком.
Допплеровский сдвиг частоты достигается за счёт того, что линейная скорость вращения диаграммы направленности больше скорости звука. При этом важно отметить, чтобы добиться такого эффекта при скорости вращения диаграммы в 30 оборотов в секунду, антенны должны быть разнесены по пространству и располагаться по окружности с диаметром более 10 м.
Чтобы допплеровский сдвиг зависел от направления излучения, направленную антенну необходимо сместить. При этом также относительно центра вращения диаграммы направленности направленной антенны смещается и ненаправленная антенна. Её новое местоположение является начальной точкой измерения пеленга. От этого местоположения будет отсчитываться также и направление излучения для направленной антенны.
В системе VOR предусмотрена также возможность опознавания маяка. Радиомаяк передаёт в эфир свой трёхбуквенный позывной, используя азбуку Морзе. Для этого используют тональную модуляцию несущих колебаний частотой 1020 Гц. Помимо азбуки Морзе радиомаяки передают информацию в виде голосового сообщения, т.е. используя телефонный режим. Здесь уже происходит модуляция речевого сообщения. В случае неработоспособности маяка передача сообщений либо отсутствует, либо в эфир с помощью Морзе передаётся слово TEST.
Согласно принципу работы системы VOR бортовое оборудование определяет пеленг самолёта относительно меридиана, проходящего через радиомаяк. Принимая во внимание тот факт, что большинство маяков ориентируется таким образом, что нулевое значение пеленга совпадает с северным направлением магнитного меридиана маяка, то можно утверждать, что через VOR измеряется магнитный пеленг самолёта (МПС), именуемый также радиалом. Однако в реальности это не всегда так. Например, в полярных районах радиомаяки ориентируют по истинному меридиану, так как магнитное склонение в тех районах достаточно велико и быстро изменяется.
Для каждого радиомаяка VOR публикуется значение угла между северным направлением истинного меридиана и направлением нулевого радиала, называемое иногда склонением станции или declination (англ.). Теоретически эта величина должна совпадать с магнитным склонением, но из-за причин, упомянутых выше, может и отличаться от него.
По правилам, если склонение станции отличается от магнитного более чем на 2°, то радиомаяк заново выставляется по магнитному меридиану, однако на практике это происходит не всегда, поэтому разница достигает 4–5°.
На современных летательных аппаратах величина склонения станции для каждого маяка хранится в бортовых базах аэронавигационных систем и учитывается при автоматизированной навигации.
Бортовое оборудование, с которым непосредственно работает пилот, при взаимодействии с системой VOR включает в себя как минимум пульт для установки частоты радиомаяка и индикатор отсчёта измеренного навигационного параметра. Индикатором чаще всего является радиомагнитный индикатор (РМИ), который способен работать как с информацией от автоматического радиокомпаса (АРК), настроенного на приводные радиостанции, так и с информацией от системы VOR, следовательно, с помощью VOR и АРК можно решать одни и те же навигационные задачи.
Несмотря на всю важность системы VOR, она постепенно вытесняется новыми системами навигации, такими как GPS (Global Positioning System), которые основываются на спутниковых сигналах и имеют большее покрытие и более точно определяют местоположение. Однако VOR, несмотря на некоторые ограничения и слабую конкурентоспособность с новыми системами навигации, ещё длительное время будет занимать свою нишу, особенно в регионах с развитой инфраструктурой, и использоваться в качестве резервной системы навигации или для дополнительной проверки данных от других систем навигации.
Список литературы
- Аэронавигация. Ч. II. Радионавигация в полете по маршруту: Учебное пособие [Книга] / авт. Сарайский Ю.Н. Липин А.В., Либерман Ю.И. - Санкт-Петербург: Санкт-Петербургский государственный университет гражданской авиации имени Главного маршала авиации А.А. Новикова, 2021 — 383 с.
- Беляевский Л. С., Новиков В. С., Олянюк П. В. Основы радионавигации : учеб. для вузов. 2-е изд., перераб. и доп. / под ред. Л. С. Беляевского. М. : Транспорт, 1982 — 288 с.
- Горбачев О. А., Ерохин В. В., Пипченко И. П., Скрыпник О. Н. Радиотехнические системы ближней навигации и посадки : учеб. пособие. Иркутск, 2006 — 193 с.
- Сосновский А. А. Авиационная радионавигация: Справочник, 1990 — 264 с.



