
Введение
Одним из важнейших факторов, влияющих на безопасность полетов, является возможность выполнения безопасной посадки самолета в сложных метеорологических условиях. Для определения степени сложности метеорологических условий вводят термин «минимум для посадки», который характеризуется минимально допустимыми значениями высоты нижней границы облачности и горизонтальной дальности видимости, при которых осуществляется безопасная посадка. В случаях, когда ручное пилотирование не обеспечивает нужного безопасности, используются системы директорного и автоматического управления посадкой.
Классификация систем. Основные компоненты.
Системы управления посадкой можно классифицируются по степени автоматизации. При ручном пилотировании самолет управляется пилотом на всех этапах захода на посадку и посадки. Директорное управление означает, что пилот выполняет только общие действия по управлению самолетом, а управление траекторией полета осуществляется системой управления. Автоматическое управление: самолет управляется системой управления на всех этапах захода на посадку и посадки. Системы директорного и автоматического управления посадкой самолетов имеют ряд особенностей, обусловленных спецификой данного вида полета. Системы управления посадкой должны обеспечивать высокую точность и надежность управления самолетом. Это необходимо для обеспечения безопасной посадки в сложных метеорологических условиях. Системы управления посадкой должны быть эргономичны и удобны в использовании. Это необходимо для снижения нагрузки на экипаж и повышения безопасности полета. Системы управления посадкой должны быть отказоустойчивыми, что обеспечивает безопасность полета в случае отказа системы. Современные системы управления посадкой самолетов являются высокоавтоматизированными системами, которые включают в себя следующие компоненты:
- Навигационные системы: обеспечивают определение местоположения самолета и его параметров движения.
- Системы управления полетом: обеспечивают управление самолетом в соответствии с заданными параметрами.
- Системы отображения информации: обеспечивают отображение информации о состоянии самолета и окружающей среды экипажу.
Современные системы управления посадкой самолетов постоянно совершенствуются. В настоящее время происходит внедрение автоматических систем выполнения посадки при нулевых значениях видимости и высоты нижней границы облачности.
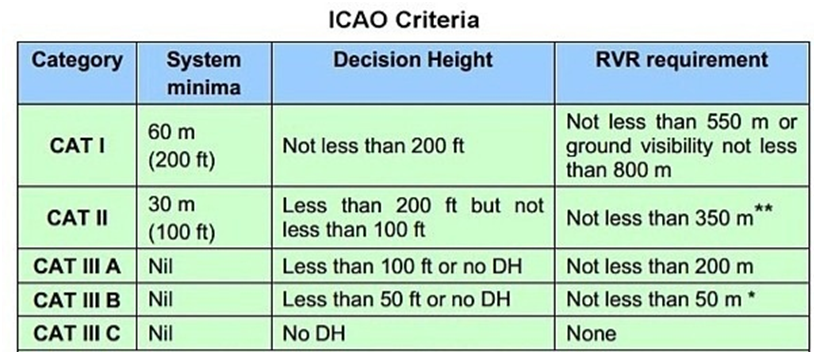
Уровень сложности посадки определяется множеством факторов, включая точность навигационных систем самолета, аэродинамические свойства и способность маневрировать, качество оборудования аэродрома, опыт экипажа и так далее. В соответствии с этими факторами самолету и аэропорту присваивается одна из нескольких категорий уровней сложности посадки. Снижение этих уровней может улучшить регулярность полетов, однако это усложняет процесс управления самолетом при заходе на посадку и во время посадки.
Концепция работы.
Автоматическая выдача пилоту командных сигналов на директорный прибор является одним из главных способов упрощения управления траекторией движения самолета при заходе на посадку. Командные сигналы формируются на пилотажно-командном приборе системы директорного управления, которая включает дополнительный контур системы ручного (штурвального) управления. Пилоту поручается задача обнуления этих командных сигналов. Система директорного управления автоматизирует сбор необходимой информации от датчиков, выполнение логических вычислительных операций над этой информацией и выдачу вторичной информации в оптимально закодированном виде на командный прибор.

В процессе директорного управления существует отличие от ручного управления. Оно заключается в том, что процесс управления сводится к стабилизации более простых координат управления с использованием вторичной информации, которая формируется директорной системой. При формировании системы траекторного управления как одного из звеньев системы директорного управления необходимо определить координату командного сигнала, способ выдачи командного сигнала, закон управления вычислителя и масштаб командного прибора. Траектория полета самолета в пространстве может быть рассмотрена как состоящая из двух составляющих - горизонтальной и вертикальной плоскостей.
Управление боковым и продольным движением самолета на директорном приборе требует вывода двух командных сигналов. Для выбора координаты управления необходимо учитывать максимальную разгрузку пилота в процессе пилотирования. Важным условием является наличие интегрирующего звена в передаточной функции самолета по выбранной координате. Исследования показали, что наиболее удобными координатами для управления боковым траекторным движением являются угол крена самолета, а для управления продольным траекторным движением - угол тангажа или интеграл нормальной перегрузки.
Для обеспечения минимальной нагрузки на пилота и унификации закона управления вычислителя в директорном и автоматическом режимах, выбраны соответствующие координаты управления. Плавное переключение между режимами также обеспечивается. Существует два способа выдачи командного сигнала пилоту. Первый способ использует командные индексы, которым соответствуют сигналы, пропорциональные углам крена и тангажа. В этом случае пилоту необходимо совместить текущие углы крена и тангажа с индексами, отклоняя элероны и рули высоты.
Если указатель текущего угла крена отклоняется от индекса заданного угла крена, это сигнализирует о необходимости корректировки текущего угла крена таким образом, чтобы он совпадал с индексом заданного угла крена. Более распространенным вторым способом является использование командных стрелок, которые получают сигналы, пропорциональные разности между заданными и текущими углами крена и углами тангажа. Пилоту в данном случае требуется удерживать путем отклонения элеронов и рулей высоты командных стрелок в среднем положении. Если командная стрелка отклоняется от среднего положения, это означает, что необходимо изменить углы крена или тангажа, чтобы стрелка вернулась в среднее положение.
В роли исполнительного устройства в контуре директорного управления пилот следит за командным сигналом. В процессе управления пилот может адаптироваться к изменяющимся условиям полета и принимать полезные предварительные меры, чтобы повысить точность управления. В директорной системе управления, динамика процессов в основном определяется законом управления компьютера и в меньшей степени зависит от квалификации пилота. Таким образом, деятельность пилота при директорном управлении существенно отличается от характера управления.
При ручном управлении деятельностью основное отличие заключается в формировании команд управления самим пилотом, в то время как в директорном режиме он выполняет команды, созданные вычислителями.
Заключение.
Система директорного управления в целом обеспечивает высокую точность пилотирования на коротких участках полета, однако она имеет недостатки, такие как ослабление контроля над приборным оборудованием и окружающей обстановкой из-за большой концентрации внимания на директорном приборе. Это приводит к увеличению времени обнаружения отказов и снижению вероятности своевременного определения нарушений режима полета, что означает важность автоматического управления, разгружающий экипаж, повышая его работоспособность, при заходе на посадку.
Список литературы
- Белогородский С.Л. Автоматизация управления посадкой самолёта
- Википедия – свободная энциклопедия [Электронный ресурс], системные требования: интернет-браузер, URL: https://ru.wikipedia.org/wiki/Автопилот
- Studopedia [Электронный ресурс], системные требования: интернет-браузер, URL https://studopedia.ru/16_52529_rezhim-direktornogo-upravleniya.html



