
ВВЕДЕНИЕ
В последние годы многие производители автомобильных транспортных систем проявили большой интерес к дополненной реальности (AR), главным образом из-за ее доступности и потенциала для создания инновационных решений.
AR — это форма человеко-машинного интерфейса (HMI), в которую виртуальные компоненты вставляются и накладываются на реальный мир, создавая иллюзию "обогащенной" реальности. Это позволяет пользователям получать необходимую им информацию об определенных аспектах или процедурах непосредственно в рабочей среде и потенциально может обогатить сенсорное восприятие человека. Основанные на определении Милграма континуума реальности и виртуальности, являются неотъемлемой частью смешанной реальности, которая представляет собой слияние реального и виртуального миров. Приложения AR варьируются от приложений для промышленности и производства (робототехника, транспорт, здравоохранение, образование) до сервисов, используемых в повседневной деятельности (игры, развлечения и так далее).
Существуют обширные исследования, в которых рассматривается влияние дополненной реальности на автомобильную промышленность, а также проблемы и направления развития в этой области.
AR открывает новые многообещающие возможности практически во всех областях автомобильной промышленности. Например, AR может значительно улучшить пользовательский интерфейс с помощью проекционных дисплеев (англ. Head-Up Display, HUD) – прозрачных устройств, предназначенных для представления различной важной информации в поле зрения водителя в режиме реального времени.
AR вносит свой вклад во многие другие этапы автомобильного производства, такие как техническое обслуживание, ремонт, диагностика, обучение специалистов по производству и потребителей продукции и т.д. Тестирование точечной сварки с использованием пространственной дополненной реальности на основе проектора, визуализация некоторых частей автомобиля с помощью портативных устройств или выполнение процедур технического обслуживания с использованием дисплеев, установленных на голове (HMDS), - вот некоторые примеры использования дополненной реальности. Технология AR начала использоваться в качестве маркетингового инструмента, чтобы клиенты могли интерактивно настроить свой автомобиль перед покупкой.
Факторы движения
Скорость
Мы можем описать движение некоторых объектов вокруг нас как быстрое, а некоторых других - как медленное, скорость - это физическая величина, которая используется для описания и измерения движения объектов (скорость = расстояние / время).
Скорость - это расстояние, пройденное за единицу времени, скорость объекта увеличивается с уменьшением времени прохождения того же расстояния, скорость объекта обратно пропорциональна времени.
Скорость объекта увеличивается при увеличении пройденного расстояния за постоянное время, скорость объекта прямо пропорциональна пройденному расстоянию.
Когда расстояние измеряется метром, а время - секундой, то единицей измерения скорости является (м/с), когда расстояние измеряется километром, а время - часом, то единицей измерения скорости является (км/ч).
ВИДЫ СКОРОСТЕЙ
Различают регулярную (равномерную) скорость и нерегулярную (неравномерную) скорость, регулярная (равномерная) скорость - это изменение положения объекта на равные расстояния за равные промежутки времени (независимо от того, коротки ли расстояние и время).
Нерегулярная (неравномерная) скорость - это изменение положения объекта на неравные расстояния за равные промежутки времени, или это изменение положения объекта на равные расстояния за неравные промежутки времени.
Трудно определить величину неравномерной скорости объекта, поэтому мы используем среднюю скорость, которая представляет собой общее расстояние, пройденное движущимся объектом, деленное на общее время, затраченное на преодоление этого расстояния.
Средняя скорость представляет собой обычную скорость, с которой движущийся объект преодолевает одно и то же расстояние за один и тот же промежуток времени.
Когда средняя скорость движущегося тела равна обычной скорости, движение описывается как регулярное движение, когда средняя скорость движущегося объекта не равна обычной скорости, движение описывается как нерегулярное движение.
Относительная скорость - это скорость движущегося объекта относительно наблюдателя, измерение относительной скорости зависит от положения наблюдателя, который определяет величину этой скорости.
Если наблюдатель находится в состоянии покоя, значит, (относительная скорость = реальная скорость объекта), если наблюдатель движется в том же направлении, что и движущийся объект, значит, (Относительная скорость = скорость объекта – скорость наблюдателя), если две скорости равны, Таким образом, относительная скорость равна нулю.
Если наблюдатель движется в направлении, противоположном движущемуся объекту, то, таким образом, (относительная скорость = скорость объекта + скорость наблюдателя).
СПИДОМЕТР
Спидометр используется для измерения скорости автомобиля. Это важный инструмент в автомобиле, потому что он действительно помогает водителям во время вождения.

Рисунок 1. СПИДОМЕТР
Ускорение (линейное и угловое)
Когда вы сидите в машине рядом с водителем и машина начинает двигаться с места по прямой, вы замечаете, что скорость автомобиля постепенно увеличивается с течением времени.
Для описания изменения скорости автомобиля за одну секунду в данном случае мы используем физическую величину, называемую “ускорение“. Ускорение - это изменение скорости объекта за одну секунду в определенном направлении, или это скорость изменения скорости.
Линейное ускорение определяется как равномерное ускорение, вызываемое движущимся по прямой телом. Существует три уравнения, которые важны при линейном ускорении в зависимости от таких параметров, как начальная и конечная скорость, перемещение, время и ускорение.
Первое уравнение движения - 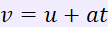
Второе уравнение движения - 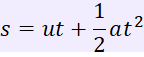
Третье уравнение движения - 
u - начальная скорость, a - ускорение, t- затраченное время, v - конечная скорость, s - расстояние
Угловое ускорение
Угловое ускорение определяется как скорость изменения угловой скорости во времени. Обычно это выражается в радианах в секунду в секунду.
Таким образом 
Угловое ускорение также известно как ускорение вращения. Это количественное выражение изменения угловой скорости в единицу времени.
Рисунок 2. Диаграмма углового ускорения
Угловое ускорение является псевдоскалярным. Знак углового ускорения считается положительным, если угловая скорость увеличивается против часовой стрелки, и принимается отрицательным, если угловая скорость увеличивается по часовой стрелке. Движение вращающихся объектов, таких как колесо, вентилятор и земля, изучается с помощью углового ускорения.
Единица измерения углового ускорения
Направление вектора ускорения перпендикулярно плоскости, в которой происходит вращение. Увеличьте угловую скорость по часовой стрелке, тогда скорость углового ускорения будет направлена в сторону от наблюдателя. Если увеличение угловой скорости происходит против часовой стрелки, то вектор углового ускорения направлен в сторону наблюдателя.
В единицах СИ угловое ускорение измеряется в радианах в секунду в квадрате (рад/с2) и обычно обозначается буквой альфа (α).
Формула углового ускорения
Угловая скорость - это скорость изменения углового положения вращающегося тела, и она представлена следующим образом: 
Где ω = Угловая скорость, θ = Угол поворота, t = Затраченное время
акселерометр - прибор, который измеряет скорость изменения скорости объекта (т.е. его ускорение).
Направления движения автомобиля
Движение автомобиля можно разделить на три оси вращения: X, Y и Z. При движении движение вокруг этих трех осей может происходить одновременно, например: качка и кренение, или крен и рыскание.
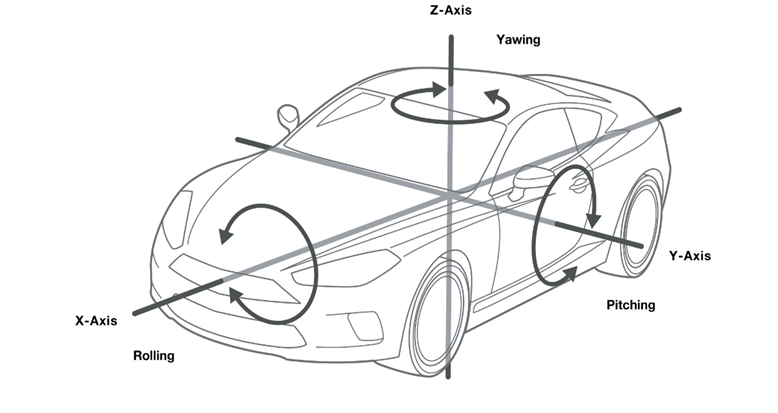
Рисунок 3. Направления движения автомобиля
Качка
Когда вы нажимаете на тормоза, ваше тело бросает вперед, а когда вы быстро разгоняетесь, ваше тело прижимается к спинке сиденья. Запомните эти ощущения: этот тип вращательного движения (происходящего в продольном направлении автомобиля, при этом ось движения проходит слева и справа от автомобиля) называется качкой. Это происходит на дорожных покрытиях с неровностями, а также при замедлении и ускорении.
Катающийся
Вы, наверное, видели, как большой автобус поворачивает за угол и как он наклоняется к внешней стороне поворота. Этот тип вращательного движения в сторону транспортного средства (при этом ось вращения проходит спереди и сзади автомобиля) называется качением. Это происходит не только во время поворота автомобиля, но и при сильном ветре, ударяющем в борта автомобиля. Ось вращения рулона называется центром рулона, и ее положение может быть изменено с помощью регулировки подвески.
Зияющий
Когда вы поворачиваете рулевое колесо во время движения, шины деформируются в том месте, где они соприкасаются с землей. Возникающая упругая сила приведет к усилию при прохождении поворота, и автомобиль начнет поворачивать. Это вращательное движение с осью в вертикальном направлении называется рысканием. Рыскание возникает и при горизонтальном ветре, но о нем часто говорят в связи с устойчивостью управления. Угол поворота, вызванный рысканием, называется углом рыскания, а скорость изменения называется скоростью рыскания.
Выводы
Использование технологий дополненной реальности в интеллектуальных системах управления транспортными средствами не только способствует простоте эксплуатации автомобиля, но и улучшает комфортные условия путешествия, повышает уровень безопасности вождения.
Список литературы
- Типы скорости и коэффициенты, необходимые для описания движения | Science online (online-sciences.com )
- https://byjus.com/physics/angular-acceleration/
- https://www.gran-turismo.com/gb/gt7/apex/driving_technique/03
- Мартинетти А.; Маркес Х.; Сингх С.; Донген Л. Размышления об ограниченном распространении дополненной реальности в промышленных секторах. Приложение. Наука. 2019, 9, 3382.
- Эггер Дж.; Масуд Т. Дополненная реальность в поддержку интеллектуального производства — систематический обзор литературы. Вычислить. Инд. англ. 2020, 140, 106195
- Джин, Хуэй и Шицзе Ли. 2015 “Исследование контроля устойчивости на основе разницы скоростей вращения колес для транспортных средств AT”. Дискретная динамика в природе и обществе 2015, 1-8.



