
Системы управления полупроводниковыми преобразователями электрической энергии представляют собой сложные устройства для обработки информации и обладают широким разнообразием в зависимости от типа преобразователя. При этом системы управления должны выполнять две основные функции: определение моментов времени для коммутации соответствующих вентилей полупроводникового преобразователя и формирование управляющих сигналов определенной длительности и формы [1]. Фазосмещающие устройства (ФСУ), входящие в состав систем управления полупроводниковыми преобразователями, нашли применение в системах питания различных судовых потребителей. К такого рода потребителям можно отнести потребителей общего судового назначения, системы электроснабжения и электропривод судовых механизмов [2].
Основная функция ФСУ сводится к формированию угла управления α в зависимости от управляющего сигнала. Наиболее широкое распространение получили ФСУ с «вертикальным» способом управления, при котором момент формирования управляющего импульса определяется равенством двух сигналов: управляющего Uy и опорного uоп, а изменение значения управляющего сигнала Uy приводит к изменению угла управления α [3, 4]. При «вертикальном» типе используются косинусоидальные и линейные формы опорного напряжения [3].
Косинусоидальная форма напряжения может быть сформирована из сетевого напряжения. При таком способе формирования опорного сигнала гармонические искажения сетевого напряжения и внешние помехи оказывают негативное влияние на работу ФСУ, что приводит к возникновению погрешностей формирования угла управления. При значительных искажениях питающей сети используется опорное напряжение в виде линейно- изменяющегося напряжения.
Достоинством цифровых ФСУ являются отсутствие временных и температурных дрейфов, технологического разброса параметров и др. [5]. В цифровых ФСУ используется линейная форма опорного сигнала uоп, которая представлена в виде кода и принимает 2n значений [3].
В судовых системах электроснабжения происходят периодические отклонения частоты питающего напряжения вследствие изменения генерируемой и потребляемой мощности. В результате чего известные ФСУ «вертикального» типа не могут обеспечить нормальное функционирование при изменении частоты напряжения. Работа ФСУ проиллюстрирована на рис. 1. Линейно-возрастающий опорный код Коп и код управления Ку приведены на рис. 1 в виде весового кода. Опорный код формируется счетчиком или сумматором, при этом изменение осуществляется за половину частоты питающего напряжения u. Начало формирования опорного кода соответствует моменту естественной коммутации вентиля полупроводникового преобразователя. Однако при отклонении частоты питающего напряжения u' от номинального u момент равенства опорного кода и кода управления будет соответствовать другому значению мгновенного напряжения u`.
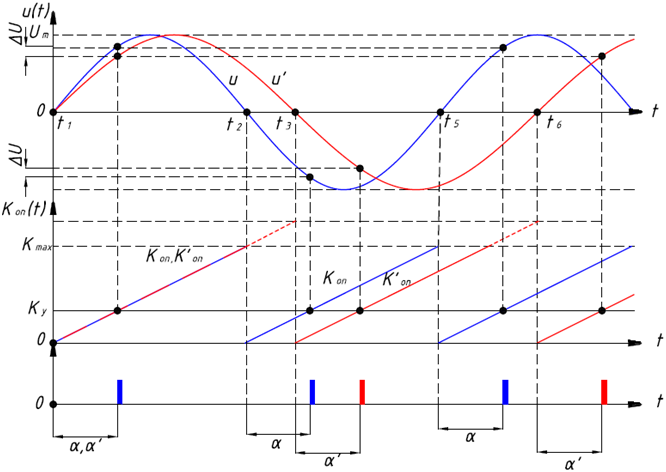
Рис. 1. Эпюры сигналов, иллюстрирующие возникновение погрешности напряжения с выхода преобразователя
Для уменьшения погрешности среднего выпрямленного напряжения с выхода полупроводникового выпрямителя используются различные методы коррекции моментов формирования угла управления: коррекция изменением опорного сигнала, а также изменением сигнала управления.
Коррекция опорного кода может достигаться изменением частоты им- пульсов, поступающих на счетчик в функции частоты питающего напряжения. Такой способ приводит к изменению наклона линейно-изменяющегося кода с выхода генератора опорного напряжения, что приводит к изменению динамических характеристик в функции отклонения частоты напряжения сети [6]. Один из вариантов построения ФСУ подобного типа включает в себя преобразователь напряжения в частоту импульсов (ПНЧ).
Работа ФСУ с коррекцией опорного кода проиллюстрирована на рис. 2. Начало формирования опорного кода осуществляется в моменты времени t1-t6. Данные моменты фиксируются синхронизирующим устройством, на вход которого подается сетевое напряжение. При отклонении частоты питающего напряжения u' от номинального u наклон линейно-возрастающего опорного кода Коп изменяется в соответствии с периодом питающего напряжения u`. Наклон сигнала К`оп зависит от частоты импульсов, поступающих на счетчик ФСУ. Моменты равенства опорного кода К`оп и кода управления Кy будут соответствовать прежнему углу управления α, которому соответствует мгновенное значение Uα питающего напряжения u.
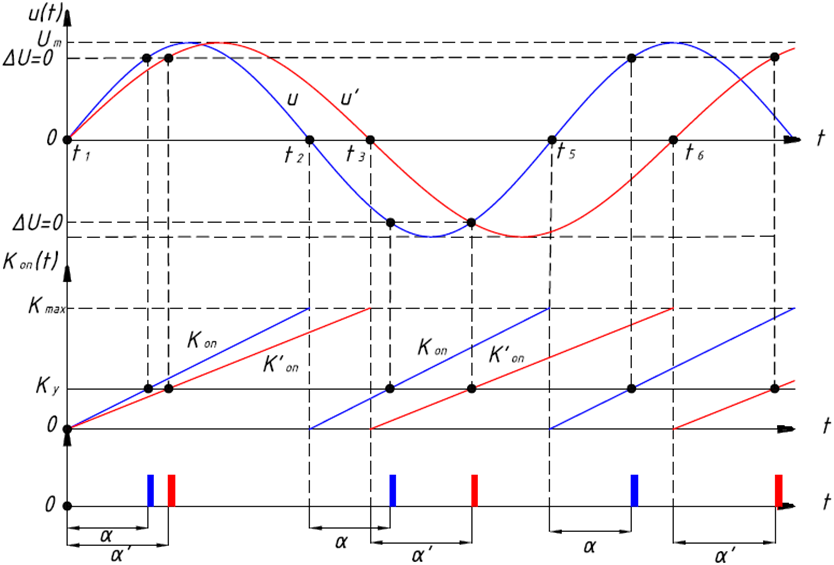
Рис. 2. Эпюры сигналов, иллюстрирующие корректировку угла управления при изменении наклона опорного кода
При коррекции угла управления способом изменения опорного кода метрологические характеристики ФСУ во многом определяются точностью работы ПНЧ. Временной и температурный дрейф и степень восприимчивости к помехам цифрового ФСУ практически полностью определяются дрейфовыми характеристиками и способом преобразования информации ПНЧ. Точность формирования угла управления в данных ФСУ также определяется погрешностью квантования периода входного сигнала, в результате изменение заданного угла управления происходит неравномерно при нестабильности частоты входного напряжения.
Вторым способом коррекции угла управления является коррекция сигнала управления в зависимости от частоты питающего напряжения. При таком способе коррекции наклон опорного кода при изменении частоты входного сигнала остается постоянным. А коррекция управляющего кода происходит непосредственно в ФСУ [1, 7].
Работа ФСУ с коррекцией кода управления проиллюстрирована на рис. 3. Начало формирования опорного кода осуществляется в моменты времени t1-t6 при переходе питающего напряжения через ноль. При отклонении частоты питающего напряжения u' от номинального u наклон линейно-возрастающего опорного кода Коп остается неизменным, а код управления Ку изменяется в соответствии с изменением периода питающего напряжения. В этом случае равенство опорного кода К`оп и управляющего кода К`y будет соответствовать углу управления α, которому соответствует мгновенное значение Uα питающего напряжения u.
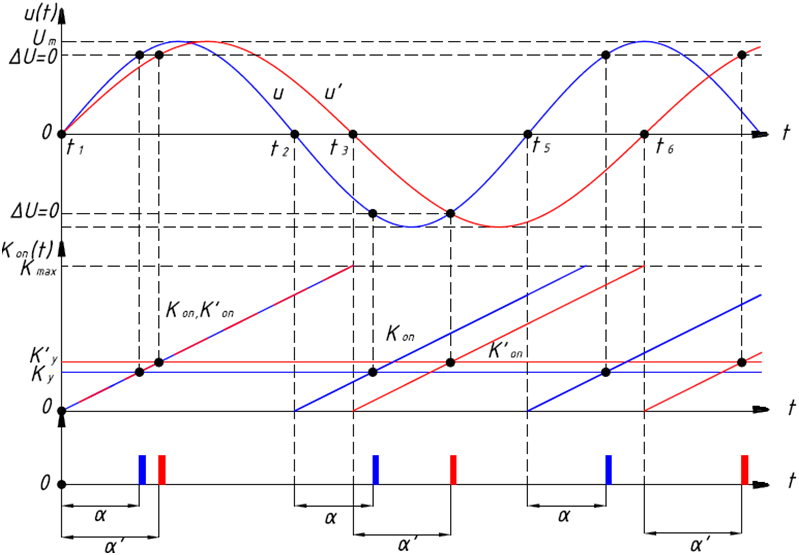
Рис. 3. Эпюры сигналов, иллюстрирующие корректировку угла управления при изменении управляющего кода
Непосредственную коррекцию управляющего кода в ФСУ может выполнять блок памяти, формирующий код в зависимости от частоты питающей сети и необходимого угла управления. По адресам блока памяти записываются коды Кзн(i,j) задающего напряжения, соответствующие частоте fc(i) питающего напряжения и заданному углу α(j) управления:
Кзн(i,j) =Кfс(i)/Кα(j) ,
где Кfс(i)– i-й адрес по первой координате, соответствующий коду частоты пи-тающего напряжения;
i – номер адреса по первой координате i =1, 2, 3…n, при этом fC(1) соответствует fC= fном +Δ f, а fC(n ) — fC= fном -Δ f ;
Кα (j) – j-й адрес по второй координате Кα (j) =π/α(j) =180о/α(j);
j – номер адреса по второй координате j =1, 2, 3…m, при этом Кα (1) соответствует α(1)=180о/m, а Кα (m) — α(m) = 180о.
Таким образом, применение фазосмещающих устройств, в состав которых входит блок памяти с записанным кодом в функции от угла управления и частоты входного сигнала, обеспечивает практически плавное изменение угла управления и высокую его стабильность в условиях нестабильности частоты питающей сети.
Список литературы
- Сугаков, В.Г. Применение фазосмещающего устройства в условиях нестабильности частоты питающего напряжения / В.Г. Сугаков, Н.С. Варламов, А.И. Мешков // Акту- альные проблемы электроэнергетики: сб. научно-технич. ст. — Н.Новгород: НГТУ им. Р. Е. Алексеева, 2016. — С. 168–172.
- Сугаков, В.Г. Цифровое фазосмещающее устройство и его области применения на объектах водного транспорта / В.Г. Сугаков, Н.С. Варламов // Актуальные проблемы электроэнергетики: сб. научно-технич. ст. — Н.Новгород: НГТУ им. Р. Е. Алексеева, 2017. — С. 99–103.
- Горбачев, Г.Н. Промышленная электроника: учебник для вузов / Г.Н. Горбачев, Е. Чаплыгин. – М.: Энергоатомиздат, 1988. – С. 279-295.
- Руденко, В.С. Основы преобразовательной техники: учебник для вузов / В.С. Руденко, В.И. Сенько, И.М. Чиженко. – М.: Высш. шк., 1980. – С. 396-417.
- Иванов, А.Г. Системы управления полупроводниковыми преобразователями / А.Г. Иванов, Г.А. Белов, А.Г. Сергеев. – Чебоксары: Изд-во Чуваш. ун-та, 2010. – С. 56-68.
- Пат. 2373624 Российская Федерация, МПК H02M 1/08 Фазосдвигающее устройство / Л.И. Цытович, М.М. Дудкин, А.В. Качалов, Р.М. Рахматулин. – №2008142656/09; за- явл. 27.10.2008; опубл. 20.11.2009. Бюл. № 32. – 15 с.
- Пат. 2612055 Российская Федерация, МПК G01R 25/00 Цифровое фазосмещающее устройство / В.Г. Сугаков, О.С. Хватов, Н.С. Варламов. – 2015155112; заявл. 22.12.2015; опубл. 02.03.2017. Бюл. № 7. – 6 с.



