
Для манипуляционных роботов не всегда выгодно ставить различные датчики для определения положения вала электропривода. Основными критериями являются цена, надежность, а также защищенности от внешних факторов (влага, пыль) и т.д., но и использовать систему без обратных связей тоже нельзя. Тогда разработчики стараются внедрить бездатчиковую систему управления для электропривода. В данной статье будут рассмотрены некоторые направления для сознания такой системы, а именно такой математический аппарат, как «наблюдатель». [1]
- Бездатчиковая система управления для двигателя постоянного тока.
Разомкнутый наблюдатель.
Запишем уравнения цепи возбуждения и коэффициента kФ следующим образом:
(1)
Тогда, воспользовавшись структурной схемой, изображенной на рисунке 1, можно при известном значении напряжения питания обмотки возбуждения можно получить оценку kФ.

Рисунок 1. Структурная схема разомкнутого наблюдателя
На вход данного наблюдателя подается напряжение обмотки возбуждения, которое система управления подает через преобразователь. Затем, разница между входным напряжением и падением напряжения на активном сопротивлении обмотки интегрируется на индуктивности, и получается ток обмотки, а потом по заданной зависимости оценивается значение kФ. [2]
К достоинствам можно отнести простоту реализации и минимальное количество измеряемых переменных.
Недостатками является сильная зависимость точности оценки от точности математической модели объекта и отсутствие контроля топлового и иных уходов.
Наблюдатель с релейной обратной связью
Данный наблюдатель будет оценивать ЭДС двигателя постоянного тока. Он повторяет структуру якоря, однако ЭДС остается неизвестной. Структура якоря изображена на рисунке 2.
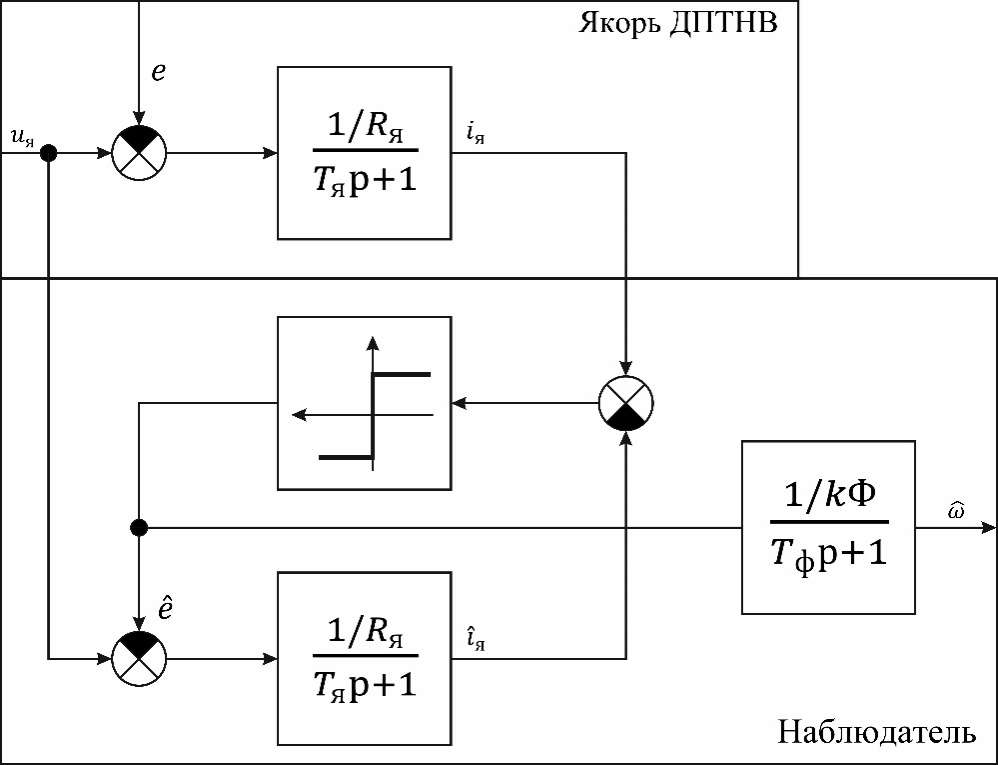
Рисунок 2. Структурная схема наблюдателя с релейной обратной связью
В составе якоря содержится инерционное звено, повторяющие параметры якорной цепи с определенной точностью. На вход подается прикладываемое к двигателю напряжение, а на выходе появится оценка тока якоря.
Для того, чтобы задать ЭДС, воспользуемся релейным элементом, выход которого должен принимать значения, большее или равное максимальному возможному значению ЭДС и меньшее или равное минимальному возможному значению ЭДС.
Если теперь фильтровать релейный сигнал переключений релейного элемента, то получим значения, приближенные к ЭДС, т.е. оценка ЭДС.
Следует учитывать, что при быстром изменении скорости возникает запаздывание на фильтрующем элементе. [2]
Достоинством является то, что данный наблюдатель всегда устойчивый. Однако, при малом моменте инерции фильтрующий элемент вносит сильную задержку в оценку ЭДС, которая может снижать показатели двухконтурной системы регулирования, замкнутой по этой оценке.
Наблюдатель с пропорционально-интегральным (ПИ) регулятором в обратной связи.
Вместо фильтрации сигнала, можно заменить релейный элемент ПИ-регулятором оцениваемого тока, структурная схема которого показана на рисунке 3. При помощи такой замены можно получать более точное приближение к реальному значению с меньшим запаздыванием во времени.

Рисунок 3. Структурная схема наблюдателя с ПИ-регулятором
Недостатком будет являться то, что выход регулятора будет содержать помехи от шума в измерении тока, что, в свою очередь, приведет к сильному дрожанию выходного сигнала наблюдателя, поэтому не самая быстрая настройка регулятора позволяет ему быть одновременно фильтром. Для достижения требуемого качества фильтрации и скорости работы наблюдателя параметры регулятора следует настраивать эмпирически. [2]
Наблюдатель ЭДС из уравнения равновесия якоря двигателя постоянного тока.
Если провести расчет регулятора для одной точке несколько раз, то получится точное значение ЭДС для измеренных величин и известных параметров модели объекта.
Данный результат можно получить, решая дифференциальное уравнение равновесия якорной цепи:
(2)
В этом уравнении кроме параметров двигателя известны напряжение якоря и текущее значение тока якоря. Для вычисления производной тока якоря во времени воспользуемся выражением:
, (3)
где iЯ[k] - значение тока якоря на текущем периоде ШИМ (или квантовании наблюдателя, если используется другая частота); iЯ[k - 1] - значение тока якоря на предыдущем периоде ШИМ и ТШИМ- период широтно-импульсной модуляции. Тогда оценку ЭДС можно получить, используя выражение:
. (4)
Данный наблюдатель наиболее быстро оценивает ЭДС. Хотя данная форма имеет операцию дифференцирования, что неизбежно будет приводить к дрожанию сигнала оценки ЭДС из-за шума в измерении тока, но сам результат представляет собой то значение, к которому стремятся релейный наблюдатель и наблюдатель с ПИ-регулятором. Для уменьшения дрожания оценки ЭДС можно применять фильтр, который будет иметь меньшую постоянную времени, чем фильтр для релейного наблюдателя.
- Система управления синхронного электропривода.
Система векторного бездатчикового управления.
Электроприводы переменного тока для стабилизации момента требуют обязательной информации о положении магнитного потока машины, которая в синхронном электроприводе связана с положением ротора. В данном случае, бездатчиковое управление понимается как отсутствие датчика положения ротора двигателя и в оценке ЭДС, что позволит восстановить положение ротора.
Запишем уравнения равновесия статорной цепи и потокосцеплений в осях а, β:
. (5)
Если построить наблюдатель ЭДС для каждой из осей, то, оценив ЭДС, можно вычислить положение вала двигателя. Структурная схема наблюдателя представлена на рисунке 4.
Сам наблюдатель состоит из трех составных частей: два наблюдателя ЭДС двигателя по осям а и β и функции арктангенса двух переменных, что позволяет вычислять угол положения ротора. [2]
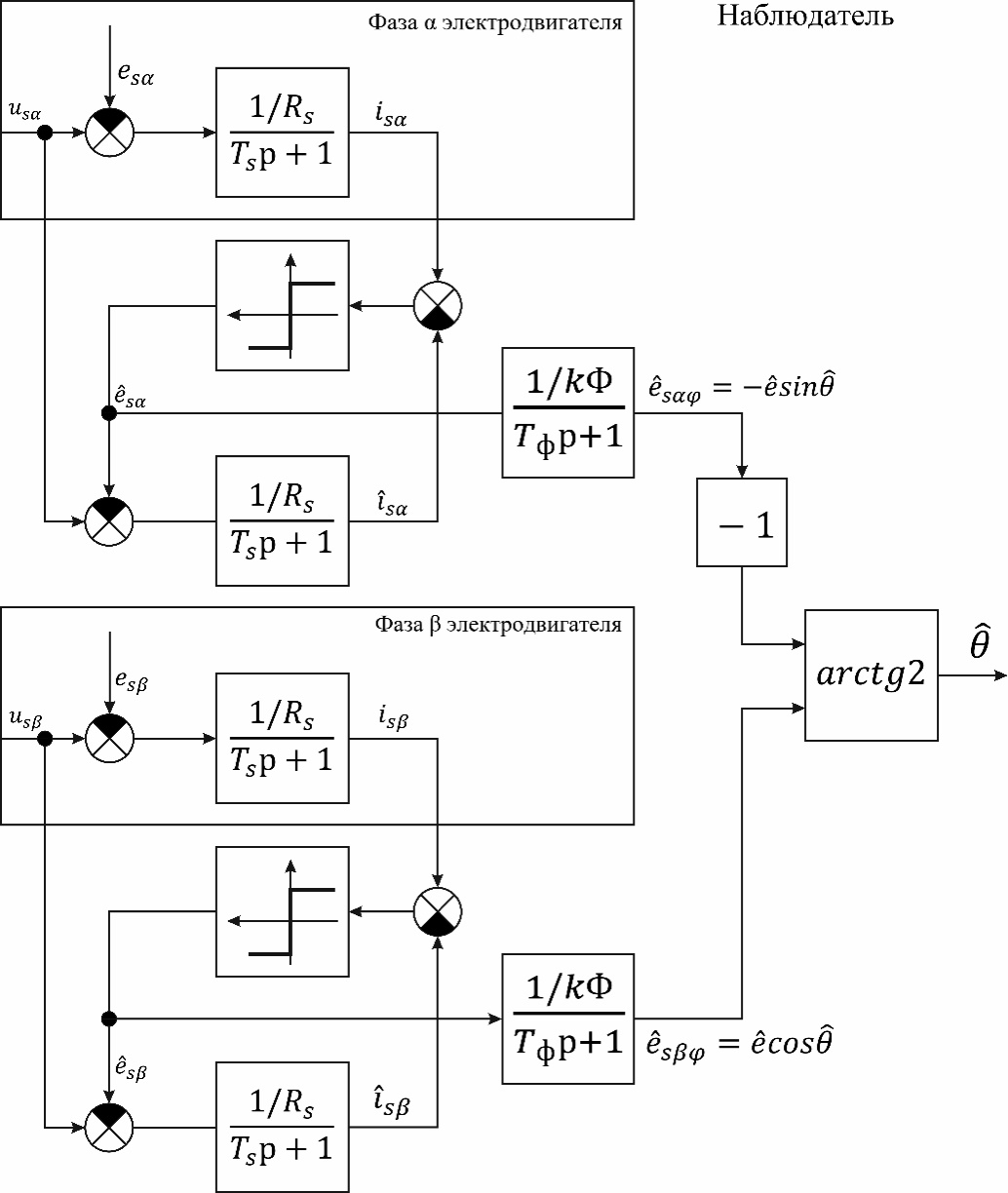
Рисунок 4. Структурная схема наблюдателя синхронного двигателя
Кроме этого, в начальный момент времени наблюдатель выдает угол с существенной погрешностью и совсем не определяет его, если скорость равна нулю.
Если учесть, что наблюдатель оценивает ЭДС, то при ее отсутствии нет возможности оценить положение ротора.
Неопределенность с положением на малых скоростях не позволяет производить пуск двигателя в режиме векторного управления. Чтобы обойти данную проблему, разработчикам систем управления приходится изобретать переключающиеся структуры.
Заключение
В рамках данной статьи были рассмотрен такой математический аппарат, как «наблюдатель», с помощью которого становится возможным управление и определение положения вала электропривода робота-манипулятора без применения датчиков обратной связи. Для всех описанных в этой статье выделены положительные и отрицательные стороны. Дальнейшее моделирование «наблюдателей» позволит более точно определить метод управления электроприводом.
Список литературы
- Е.И. Юревич УПРАВЛЕНИЕ РОБОТАМИ И РОБОТОТЕХНИЧЕСКИМИ СИСТЕМАМИ - Санкт-Петербург, 2000. – 171 с.
- Анучин А.С. Системы управления электроприводов: учебник для вузов. ̶ М.: Издательский дом МЭИ, 2015. ̶ 373. с.:ил.



