
В предыдущей статье [1] рассматривался вопрос по подготовке ансамбля моделей, описывающего параметры пластов в составе геологического разреза месторождения, подготовленного на минимальном наборе данных: данные каротажа при вертикальном бурении, геометрии горизонтального ствола, естественной радиоактивности пород и глубины кровлей и подошв 2 опорных скважин.
Несмотря на ограниченный набор параметров для обучения моделей, к системе предъявляются следующие требования:
- сохранение высокой точности при проводке ствола;
- мониторинг процессов в режиме реального времени;
- снижение влияние человеческого фактора;
- соблюдение требуемого уровня отказоустойчивости.
Далее будут представлены основные технологии, используемые в проектировании и реализации такой системы реального времени.
Процесс передачи данных с забоя на устье при бурении скважин представляет собой отправку пакетов информации с забойных датчиков по некоторому каналу связи: акустическому, гидравлическому, электромагнитному, проводному или комбинированному. Выбор типа канала зависит от условий месторождения, оборудования буровой компании и сложившейся практики производства (в основном используется гидравлический канал связи, так как в нем в качестве канала связи используется столб бурового раствора в бурильной колонне, а следовательно, не требуется дополнительных затрат на организацию канала связи; также он обладает большой дальностью действия). Главная задача – это доставка информации с минимальными потерями в кратчайшие сроки. Отправка пакетов происходит с равными временными интервалами, что облегчает анализ входящего трафика и построение диаграмм.
Для приёма сигнала используется специальное оборудование в составе устьевого. На данном этапе входящий трафик логируется, обрабатывается на сервере в формат сообщения к оркестратору моделей, и далее оркестратор, получая запрос, возвращает значение, наиболее точно (с максимальной вероятностью) описывающее положение ствола скважины в стратиграфическом разрезе.
Получаемые от оркестратора значения передаются в модуль графического представления информации. Каждый такт (получение нового пакета информации) происходит анализ положения пластов разреза и компоновки низа бурильной колонны с последующей отрисовкой графиков.
Первоначальные настройки параметров пластов задают ПО отобразить их только в виде горизонтальных слоёв, что не соответствует реальному разрезу (график 1), поэтому графический вывод корректируется в режиме реального времени (графики 2, 3), что позволяет оператору и инженерному составу управлять технологическим процессом в полной мере.

График 1. Начальная схема проводки скважины с минимальной информацией по положению кровлей и подошв геологических пластов

График 2. Литологический разрез месторождения с алгоритмически уточнёнными параметрами в процессе бурения
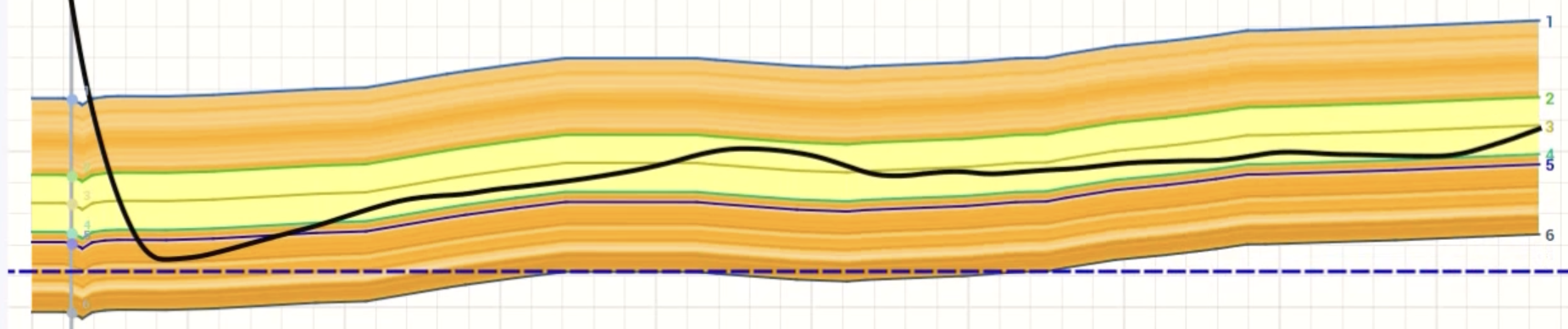
График 3. Итоговый литологический разрез
Исполнительное серверное ПО представлено модулем по ETL, анализу данных и подготовке моделей; упаковано в докер-образ [2] и развёрнуто как контейнер в кластере kubernetes [3]. Такая конфигурация хорошо зарекомендовала себя в схожих архитектурах и отвечает требованиям к текущей задаче.
По эффективности работы всей системы – достигнутая точность составила 94 %. Расчёт производился на основании полученных данных при проводке скважины и по результатам последующих геофизических работ.
Описанный выше подход по прогнозированию положения ствола скважины в режиме реального времени способствует более точной проводке скважины со снижением вероятности получения осложнений, связанных с выходом из интервала продуктивного горизонта.
Список литературы
- Постовалов Р.Ю. Восстановление геометрии геологических пластов на базе моделей машинного обучения / Р.Ю. Постовалов // Журнал «Научный Лидер». — 2021. — No 23 (25). — С. 46—51.
- Docker: Empowering App Development for Developers [Электронный ресурс] – URL: https://www.docker.com/ (дата обращения 24.01.2022).
- Kubernetes [Электронный ресурс] – URL: https://kubernetes.io/ru/ (дата обращения 24.01.2022).



