
Вопросы уравновешивания механизмов , я считаю рассматриваются во всех литературных изданиях по теории механизмов и маши . В данных изданиях предлагаются различные схемы уравновешивания и дается оценка с позиций снижения сил инерции и их влияние на вибрации машины , шума и износа кинематических пар . Можно заметить , что при конструировании новых механизмов их уравновешивание просто не предусматривается . Причины этого можно вскрыть с помощью уравновешивания механизма машины как ротор , который непосредственно участвует в работе полностью .
В известных на сегодняшний день источниках , сила подается очень плохо , а точнее совсем не контролируется , что впоследствии приводит к частой обрывности всей цепи генератора , а если ставить в учет высокую инерционную нагрузку , то это причина быстрого износа кинематичесих пар.
В связи с появлением быстроходных машин возникла проблема уравновешивания быстровращающихся деталей. Так, например, скорость некоторых турбин, валов гироскопов, суперцентрифуг достигает 3-50 тысяч об/мин и малейшее смещение центра масс с геометрической оси вращения вызывает появление больших сил инерции, т.е. вибрационных явлений в машине и фундаменте.
При вращении какой-либо i-й массы m на нее действует сила инерции, которую можно разложить на нормальную

и тангенциальную

составляющие (рис. 6.1).
Величины этих сил можно вычислить по формулам
(1)
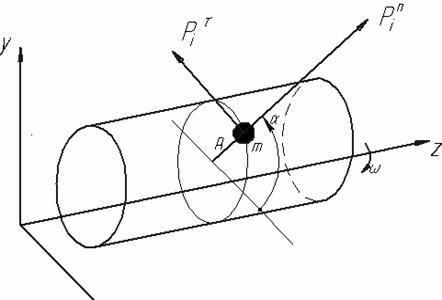
Рис. 6.1. Схема ротора
Спроектируем эти силы на оси х, у, z и определим моменты этих сил относительно осей:
(2)
Подставив (1) в (2) и просуммировав, получим (учитывая, что

,

)

(3)
Силы

и

, моменты

и

равны нулю в том случае, если координаты x и y массы m расположены на оси вращения z (т.е. центр масс ротора неподвижен):

(4)
Это есть условие статической уравновешенности ротора.
Моменты

и

равны нулю, если центробежные моменты инерции ротора равны нулю:

(5)
Это есть условие динамической уравновешенности ротора.
Такое уравновешивание применяется для плоских деталей, длина которых мала по сравнению с диаметром.
Выводы: ротор статически уравновешен, если его центр тяжести расположен на оси вращения; ротор динамически уравновешен, если его ось вращения является главной центральной осью инерции.
Уравновешенность ротора можно охарактеризовать и силовыми параметрами. Он статически уравновешен, если главный вектор сил индукции

. Ротор динамически уравновешен, если главный вектор моментов сил инерции

.
При проектировании роторов используют условия (4) и (5). При проверке уравновешенности изготовленных роторов используют условия

и

. Устранение остаточной неуравновешенности уже изготовленного ротора, возникшей по причинам неточности изготовления, монтажа, из-за неоднородности материала, из которого изготовлен ротор, называется балансировкой. Балансировка вращающихся масс осуществляется на специальных балансировочных станках, при этом исключается неуравновешенность, вызванная неточностью изготовления детали. Техника статической и динамической балансировки жестких роторов входит в содержание лабораторного практикума по дисциплине «Теория механизмов и машин».
Список литературы
- Артоболевский И.И. Теория механизмов и машин: [Учеб. для втузов]. – 4-е изд., перераб. и доп. – М.: Наука, 2009. – 639 с.: ил.; 22 см.
- Кореняко А.С. «Курсовое проектирование по теории механизмов и машин», Издательство «Вища школа», 2007 г. ? 326с.
- Решетов Д.Н. «Детали машин» учебник для вузов. Р47 Изд. 3-е М., «Машиностроение», 2008.
- Теория механизмов и машин. Терминология: Учеб. пособие / Н.И.Левитский, Ю.Я.Гуревич, В.Д.Плахтин и др.; Под ред. К.Ф.Фролова. – М.: Изд-во МГТУ им. Н.Э.Баумана, 2007.– 80 с.
- Теория механизмов и механика машин: Учеб. для втузов / [К.В. Фролов, С.А. Попов, А.К. Мусатов и др.; Под ред. К.В. Фролова. – 2-е изд., перераб. и доп. – М.: Высш. школа, 2008. – 496 с.: ил.



