
Радарные датчики, на данном этапе развития науки и технологий в мире, активно применяются в большом количестве областей. На основе радарных датчиков делают, к примеру: дальномеры, датчики уровня жидкостей, датчики движения и освещённости. Также радарные датчики с течением времени всё чаще применяются для решения ряда задач в робототехнике, активно применяются в авиации, автомобилестроении, в том числе и в системах беспилотного транспорта на основе искусственного интеллекта. Чем сложнее и технологичнее область примирения радарных датчиков, тем больше предъявляется требований к их конструкционным особенностям, точности измерений и помехоустойчивости.
Обзор радарных датчиков стоит начать и с их применения в области автомобилестроения, как одной из самых обширных и быстро развивающихся областей и применения. Практически каждый современный автомобиль оснащён системой адаптивного круиз-контроля. Она помогает поддерживает безопасное расстояние до соседних, как правило впереди и сзади идущих, в потоке. Такая система в автоматическом режиме регулирует скорость. Как правило, основная часть таких систем на рынке автомобилей используют одни и те же устройства для контроля скорости. В их основе радарный датчик, который и определяет расстояния между автомобилями (рисунок 1).

Рисунок 1. Сигнал радара на системе круиз-контроля

Рисунок 2. Радарный датчик и модуль управления в модели BMW 745i
На этом применения радарных датчиков в автомобилях не заканчивается. Система помощи при парковке (парктроник) также оснащается такими датчиками. Благодаря использованию этой системы в автомобиле управление им становится более комфортным и безопасным. В условиях сложной парковки и при движении по узким проездам он облегчает совершение сложных маневров. Чаще всего бампер и кузов автомобиля получают небольшие повреждения в условиях плохого обзора или «слепой» парковки.
Как правило, такие системы имеют простой способ установки и не требуют особого ухода. И наряду с этим, устраняют проблему «слепых зон», т.к. некоторые модели помимо датчиков оснащены также и камерами, изображения с которых, транслируется напрямую, а, в случае недопустимого значения приближения с объектом, оповещают пользователя звуковым и световым сигналом, отображают дистанцию в метрах.

Рисунок 3. Принцип работы системы радарной парковки
Сканирующие радарные датчики
С развитием искусственного интеллекта и беспилотного транспорта, для предотвращения аварийных ситуаций, таких как столкновение или столкновение на радиусных поворотах, радарные датчики должны определять азимутальные координаты объектов. Для этого производители радарных датчиков используют многолучевую переключаемую антенну или механически сканирующую антенну.
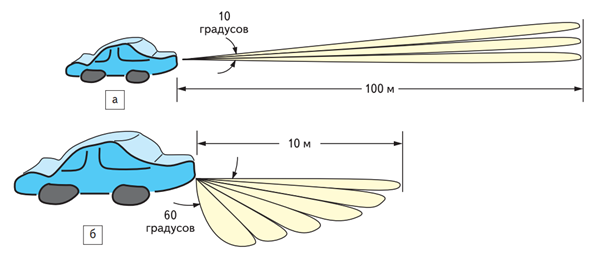
Рисунок 4. Принцип работы антенны с переменным полем обзора
Наиболее общим решением для всех ситуаций является антенна с электронным сканированием, у которой поле или угол обзора изменяется в зависимости от дорожной ситуации, дальности и типа неподвижного препятствия или подвижного объекта.
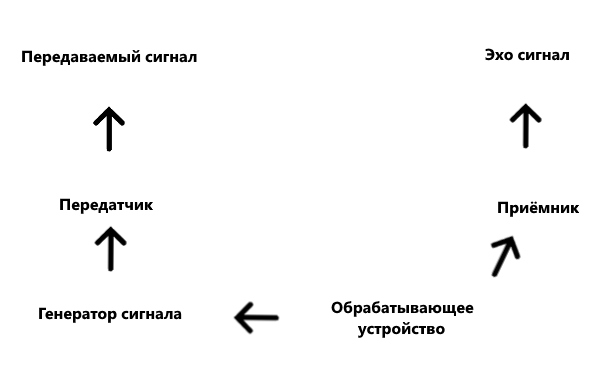
Рисунок 5. Структурная схема радарного датчика
На рисунке представлена обобщённая структурная схема любого радарного датчика, для обобщения принципа работы схема была упрощена. Так, например, при наличии в схеме антенны, которая будет являться и приёмником, и передатчиком, в дополнение к ней появится дуплексер (мультиплексер).
Любой радарный датчик если упростить имеет общую конструкцию: генератор сигналов, излучатель, приёмник, обрабатывающая микросхема с обвязкой и источник питания.
Принцип работы такого рода датчиков состоит в следующем: генератор сигнала формирует радиосигнал, частота которого изменяется во времени по линейному закону (линейный частотно-модулированный сигнал). Этот сигнал излучается в пространство, отражается от какого-либо объекта и часть сигнала, через определенное время, зависящее от скорости света, возвращается обратно к устройству и регистрируется приёмником.
Разница частоты переданного и отраженного сигнала f1 (рисунок 6) пропорциональна времени распространения электромагнитной волны t1 до объекта в пространстве и обратно. Зная, что скорость распространения волны равна скорости света и зная время распространения можно легко вычислить расстояние от передатчика до объекта (отражателя).
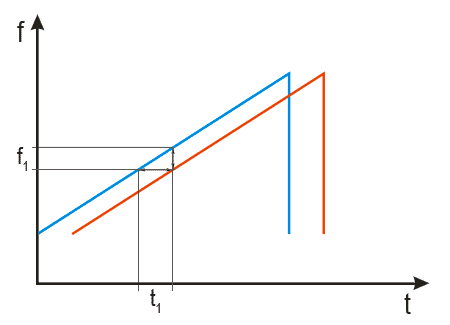
Рисунок 6. Разница часто переданного и отражённого сигналов
Но это идеальный случай возможный только при наличии идеального отражателя. В реальности же, в окружающем пространстве могут быть посторонние объекты и т.д. В этом случае, картина отраженного сигнала может быть совсем другой (рисунок 7).
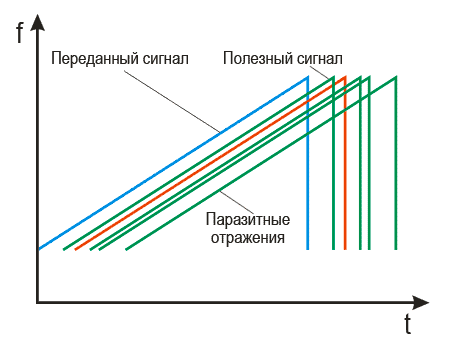
Рисунок 7. Спектр эхо-сигнала
В данном случае невозможно определить разницу частот простым вычитанием - нет единого значения. Поэтому применяется более сложная операция смешения излученного и принятого сигнала. В результате получается не число, а «низкочастотный результирующий сигнал», в котором присутствуют и полезные и паразитные частоты.
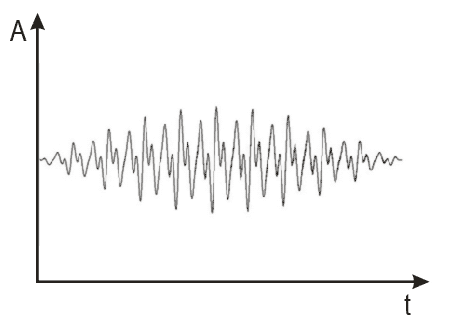
Рисунок 8. Низкочастотный результирующий сигнал
Дальнейшая обработка сигнала осуществляется обрабатывающим устройством, в большинстве случаев, микроконтроллером.
Для этого, результирующий сигнал, полученный в результате смешения переданного и принятого сигнала, подвергают спектральному анализу. При помощи методов цифровой обработки частотный сигнал преобразуется в спектральную картину (рисунок 9).
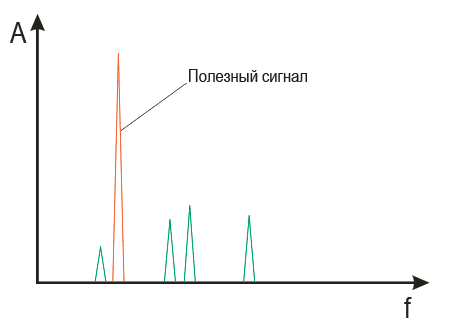
Рисунок 9. Спектральная картина эхо-сигнала
После этого осуществляется точное определение частоты f полезного сигнала и пересчет ее в значение расстояния от излучателя до объекта измерения. И производится дальнейшая обработка и вычисления согласно поставленной задачи [4, 5].
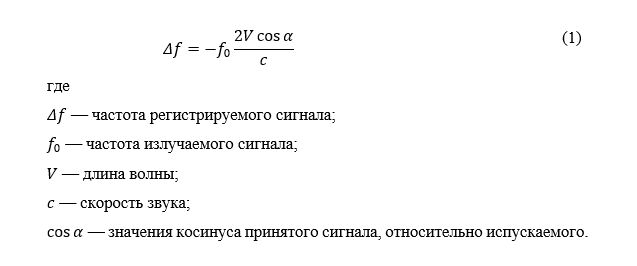
Работа радарных датчиков для обнаружения движущихся объектов не была бы возможна без использования эффекта Допплера. Он заключается в зависимости частоты регистрируемого приёмником эхо-сигнала зависит от радиальной скорости объекта (т.е. от направления движения объекта и его скорости)
Формула для доплеровского смещения частоты:
Радиолокационные датчики, основанные на данном эффекте, широко применялись и применяются в авиации, например, прибор ДИСС-7, предназначенный для непрерывного автоматического вычисления составляющих вектора полной путевой скорости, в самолётной системе координат XYZ (рисунок 10). В последнее время, вместе с развитием беспилотных систем управления автомобилем, Допплеровские датчики стали активно использоваться искусственным интеллектом таких систем для управления транспортным средством.

Рисунок 10. Составные части ДИСС-7
При большом количестве одновременно работающих радарных датчиков, неизбежно возникают помехи в приёме сигнала. Одним из решений такой проблемы может стать использования в качестве задающего элемента опорной частоты передатчика генератора хаотических колебаний (генератора хаоса).
Список литературы
- Вендик О., Парнес М. Фазовращатели сканирующих антенн для радаров обзора территорий // Беспроводные технологии. 2007. № 3.
- Lukin K. A. A Novel Approach to Scanning Antenna Design // Proc.4-th Int. Conf. on Antenna Theory and Techniques, ICATT. – 2003. – 2. – Р. 290-293
- Lukin K. A. Synthetic Aperture Scanning Antennas // Proc. 5-th European Conference on Synthetic Aperture Radar, EUSAR2004 (May 25-27, Ulm, Germany). – 2004. – 2. – Р. 679- 672. 31. Lukin K
- Лукин К. А. Шумовая радарная технология // Радиофизика и электроника. – Харьков: Ин-т радиофизики и электрон. НАН Украины. – 1999. – 4, № 3. – С. 105-111.
- Bourret R. A. proposed technique for the improvement of range determination with noise radar // Proc. IRE. – 1957. – 45, No. 12. – P. 1744-1744
- Белопольский А.А. О принципе Доплера // Известия русского астроном. общества. — 1898. — Вып. 6. — С. 413–421.
- Сhernyak V. S., Immoreev I. Ya., Vovshin B. M. Radar in the Soviet Union and Russia: A brief historical outline // IEEE. Aerosp. Electron. Syst. Mag. – 2003. – 18, No. 12. – P. 8-12. 3.



