
Современные зарядные комплексы (ЗК) представляют собой сложные технические системы (СТС), включающие разнообразные технические комплексы (ТК), в том числе цифровые средства управления, контроля и диагностики. Особенно важным и сложным является комплекс контрольно-поверочной аппаратуры (КПА), который является частью системы управления и контроля ЗК. Эти ТК должны соответствовать строгим требованиям надежности [1; 2].
Одной из ключевых задач КПА является выявление, поиск и локализация отказов, возникающих в аппаратуре системы управления и контроля. В процессе работы в КПА могут возникать различные неисправности. Для предотвращения их появления и устранения существуют три основных направления:
- предотвращение отказов;
- улучшение ремонтопригодности;
- обеспечение отказоустойчивости аппаратуры.
Первое направление на текущем уровне развития технологий не позволяет полностью исключить возможность отказов. Реализация второго направления может привести к задержке выполнения задач КПА, а при отсутствии резервных элементов — к их срыву. Третье направление связано с отказоустойчивостью, которая предполагает способность КПА продолжать работу с вероятностью, не ниже заданной, при возникновении неисправностей. Основой обеспечения отказоустойчивости являются процессы диагностики и принятие многоальтернативных решений о техническом состоянии КПА на основе ее самоконтроля [3].
В современных ЗК использование отказоустойчивости КПА ограничено из-за отсутствия соответствующей стратегии самоконтроля и действующих инструкций по эксплуатации (ИЭ). Принятие решений основано на двухальтернативной схеме, где любой отказ КПА рассматривается как отказ всей системы, что приводит к прекращению подготовки комплекса к использованию. Однако не все отказы приводят к полной неработоспособности КПА, некоторые из них лишь снижают ее функциональность. Поэтому третье направление представляется наиболее перспективным, особенно для современных ЗК.
Таким образом, обеспечение отказоустойчивости КПА путем автоматизированного выявления и локализации отказов является актуальной научной задачей. Для ее решения необходимо разработать гибкую систему самоконтроля, которая может адаптироваться к различным видам отказов и условиям эксплуатации. Такой алгоритм должен учитывать функциональную структуру КПА, оценивать влияние отказов на работоспособность системы и определять целесообразность продолжения ее работы [4].
Анализ задач и функций выполняемых контрольно-поверочной аппаратурой зарядного комплекса электромобилей и особенности ее структуры.
Контрольно-поверочная аппаратура (КПА) встроенная в аппаратуру управления ЗС и бортовая аппаратура управления зарядкой электромобиля (БАУ) обеспечивает решение главной задачи зарядного комплекса – безопасная и быстрая зарядка ЭМ.
Следует различать понятия функции и задачи зарядного комплекса.
Функция комплекса — это набор операций, приводящий к достижению одной из целей задачи зарядного комплекса.
Под задачей комплекса следует понимать совокупность технических операций, необходимых для достижения одной из его основных целей. Одним из примеров задач ЗК является подготовка процесса безопасной зарядки и осуществление самого процесса зарядки одного из типов, подключаемых к ЗС электромобилей.
В ЗК выполнение отдельных функций направленных на достижение целей задачи производится в автономном режиме.
К таким функциям относятся:
- управление подачей питания на аппаратуру управления ЗС и устройство управления зарядкой ЭМ;
- контроль исходного состояния КПА;
- контроль сопротивления изоляции;
- предоставление в систему управления (СУ) стимулирующих сигналов с заданными характеристиками, включая управляющие и командные сигналы;
- управление подключением к оборудованию СУ необходимых нагрузок или их имитаторов;
- приём и преобразование контролируемых сигналов от оборудования СУ;
- организация каналов преобразования контролируемых сигналов и формирования стимулирующих сигналов;
- загрузка, хранение и выполнение программ контроля аппаратуры зарядного комплекса;
- приём и выполнение команд оператора;
- предоставление данных оператору или для ввода в другую информационную систему;
- обработка полученной информации с реализацией математических алгоритмов с целью:
1) определения параметров оборудования ЗК;
2) формирования результатов контроля определённого типа;
3) преобразования входных данных в формат, пригодный для использования контрольно-проверочной аппаратурой (КПА);
4) преобразования выходных данных в формат, удобный для восприятия оператором.
5) Проведения самоконтроля КПА посредством введения в алгоритм эквивалента электромобиля (ЭЭМ).
Анализируя функции КПА, можно выделить её основные цели:
- Подготовка к запуску процесса зарядки и запуск зарядки одного из типов электромобилей.
- Контроль функционирования бортовой аппаратуры управления зарядом ЭМ и аппаратуры управления ЗС.
- Контроль работоспособности оборудования ЗК.
Для выполнения каждой задачи, поставленной перед КПА, требуется совокупность определенных аппаратных средств.
Так, для выполнения задачи подготовки к запуску и осуществления запуска процесса зарядки ЭМ, в КПА необходимо наличие аппаратуры подготовки и запуска (АПЗ).
Для контроля функционирования бортовой аппаратуры управления зарядом ЭМ и аппаратуры управления ЗС требуется аппаратура контроля функционирования (АКФ).
Для контроля работоспособности оборудования ЗК применяется аппаратура контроля работоспособности (АКР).
Совокупность АПЗ, АКФ и АРК, включая элементы самоконтроля, составляют КПА ЗК.
В некоторых случаях разделение на функциональные блоки не совпадает с конструктивным делением. То есть элементы, выполняющие определённые функции, могут находиться как в составе зарядной станции, так и на стороне подключаемого электромобиля.
Функциональный состав АПП зависит от конструкции бортовой аппаратуры управления зарядом электромобиля и требований к её проверке и запуску. Эти требования индивидуальны и определяются производителем конкретной марки и модели ЭМ.
Определение состояния работоспособности — это процесс, в ходе которого определяется, в рабочем ли состоянии находится объект или нет, в соответствии с техническими требованиями, установленными для основных характеристик объекта. Эти требования указаны в технической документации на объект.
Такой контроль может осуществляться по одному параметру или по набору параметров и их признаков.
В существующих системах контроля работоспособности объекта используется множество контролируемых параметров. Для этого задействуются элементы бортового зарядного оборудования ЭМ, и имитируется их работа в режиме, близком к зарядному. Это позволяет более точно оценить соответствие рабочих характеристик заданным значениям без нарушения связей между элементами БЗА электромобиля и аппаратурой управления ЗС.
Под работой объекта контроля (ОК) подразумевается выполнение объектом определённого алгоритма в соответствии с его назначением или в ходе имитации использования.
В связи с этим программа мониторинга корректной работы БЗА электромобиля имеет временные ограничения, что сокращает количество проверок по сравнению с контролем работоспособности.
Обычно такой контроль осуществляется по нескольким ключевым параметрам. Как и в случае с проверкой работоспособности, он проводится путём имитации работы элементов Зарядной аппаратуры в условиях, приближенных к рабочим. Поэтому программы этих проверок в значительной степени схожи [5; 6; 7].
Задачи контроля работоспособности и функционирования БЗА электромобиля, а также подготовки и запуска процесса зарядки в существующих ЗК решаются единой (в смысле конструктивного и функционального исполнения) КПА. Возможность использования единой КПА для решения указанных задач обусловлена особенностями их содержания и направленностью на управление одним объектом - это зарядный комплекс.
Для выполнения каждой из этих задач требуется определённая совокупность операций контроля и управления, пересекающихся между собой при выполнении различных задач [8].
Например, в каждой задаче есть операции контроля и управления, которые используются и в других задачах. Такие как:
- подача питания на элементы зарядной аппаратуры;
- настройка ЗК на необходимый режим работы;
- ввод и расчёт исходных данных и т. д.
Некоторые операции при подготовке ЗК и запуске процесса зарядки не являются обязательными для осуществления успешного протокола зарядки ЭМ. Такими операциями для всех зарядных комплексов являются:
- Проверка сопротивления изоляции электрически разобщенных цепей контрольно-проверочной аппаратуры ЗС и бортовой зарядной аппаратурой ЭМ;
- Контроль правильности стыковки зарядных разъемов ЗС и ЭМ;
- Оценка исходного состояния элементов КПА и БЗА;
- Контроль работы бортовых источников питания ЭМ после их активации и другие.
Наличие таких операций обусловлено требованиями обеспечения безопасности при подготовке и запуске стабильного режима зарядки ЭМ. Для каждой операции контроля и управления используется определённый набор элементов КПА. Следовательно, совпадение операций, осуществляемых при контроле работоспособности БЗА электромобиля и аппаратуры управления ЗС, контроле правильности функционирования и подготовке процесса зарядки обуславливает возможность использования части средств КПА при решении полного спектра задач.
Модель структуры КПА можно представить в виде трех пересекающихся функциональных частей: АПЗ, АКР и АКФ. Это решение позволяет эффективно решать задачи, учитывая совпадение некоторых операций. Такое представление наглядно показано на рисунке 1 позволяет разделить её на семь подмножеств (АПКРФ, АКРП, АКФП, АКРФ, АП, АР, АФ).
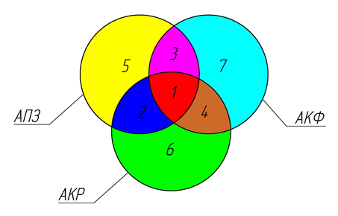
Рисунок 1. Модель структуры контрольно-поверочной аппаратуры ЗК в виде трёх пересекающихся функциональных частей
На рис. 1 каждая точка  внутри окружностей отображает некоторый элемент
внутри окружностей отображает некоторый элемент
![]() (1)
(1)
где:
- область 1 – подмножество функциональных элементов КПА, участвующее в реализации всех трех задач
- область 2 – подмножество функциональных элементов КПА, которые участвуют как в контроле работоспособности, так и в подготовке ЗК к процессу зарядки
- область 3 – подмножество функциональных элементов КПА, реализующая только предпусковые проверки и запуск процесса заряда ЭМ
- область 4 – подмножество функциональных элементов КПА, необходимое для предпусковых проверок и контроля работоспособности ЗК в процессе работы
- область 5 – отображает совокупность функциональных элементов, реализующих исключительно операции запуска ЗК
- область 6 – это подмножество функциональных элементов КПА, принимающих участие только в контроле работоспособности ЗК
- область 7 – отображает набор функциональных элементов КПА, необходимых исключительно для предпусковых проверок
- контроль исходного состояния СУ и К и т.д.
Функциональные подмножества КПА являются булевым полем множеств. Исходя из этого можно записать:
АКР  АПЗ АКФ = АПКРФ
АПЗ АКФ = АПКРФ
(АКР АКП) \ АКПРФ = АКРП
(АКФ АПП) \ АПКРФ = АКФП
(АКР АКФ) \ АПКРФ = АКРФ
АПП \ (АПКРФ  АКРП АКФП) =АП
АКРП АКФП) =АП
АКР \ (АПКРФ АКРП АКРФ) = АР
АКФ \ (АПКРФ АКФП АКРФ) = АФ
АПКРФ АКРП АКФП АП = АПЗ
АПКРФ АКРП АКРФ АР = АКР
АПКРФ АКФП АКРФ АФ = АКФ
F(КПА)=F(АПЗ АКРАКФ)=(F(АКР)F(АПЗ)F(АКР)F(АКФ)F(АПКРФ)) / F(АПКРФ АКРП) F(АПКРФ АКРФF(АПКРФ АКФП)) [9].
АКРАКФ)=(F(АКР)F(АПЗ)F(АКР)F(АКФ)F(АПКРФ)) / F(АПКРФ АКРП) F(АПКРФ АКРФF(АПКРФ АКФП)) [9].
Взаимосвязь между указанными компонентами КПА может быть различной, в зависимости от того, насколько полно применяются элементы АПЗ (которые необходимы для выполнения ЗК своих задач) в целях контроля бортовой аппаратуры, и насколько идентичны программы контроля работоспособности и предстартового контроля бортовой аппаратуры ЭМ.
Основной целью зарядного комплекса является обеспечение стабильного и безопасного процесса зарядки АКБ электромобиля. С технической точки зрения, эту задачу можно свести к успешной подготовке и осуществлению процесса зарядки без сбоев.
Исходя из этого, все задачи ЗК можно разделить на две категории: основные, связанные с подготовкой и управлением процессом зарядки, и вспомогательные, направленные на мониторинг состояния оборудования системы управления ЗК.
Для удобства дальнейшего анализа функциональные элементы КПА и их функции можно разделить на две группы:
- Первая группа включает в себя функциональные элементы КПА, которые необходимы для подготовки и осуществления процесса зарядки ЭМ;
- Вторая группа включает в себя функциональные элементы КПА, отвечающие за контроль работоспособности зарядного комплекса и мониторинг его функционирования.
Модель КПА для этих двух пересекающихся функциональных частей представлена на рисунке 2.
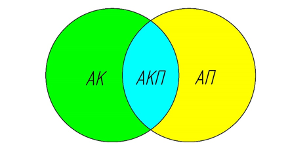
Рисунок 2. Модель структуры контрольно-поверочной аппаратуры ЗК
для двух пересекающихся функциональных частей
В состав АКП=АП ∩ АР входят подмножества функциональных элементов, которые одновременно относятся и к АК, и к АП. С точки зрения того, как возникший отказ в АКП влияет на способность КПА выполнить поставленную задачу, функциональные элементы, относящиеся к части АКП, следует рассматривать как часть элементов АП.
В результате упрощённая модель КПА примет вид, приведенный на рисунке 3.
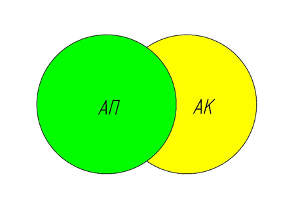
Рисунок 3. Упрощенная модель структуры контрольно-поверочной аппаратуры ЗК
для двух пересекающихся функциональных частей
Анализ средств и методов самоконтроля контрольно-поверочной аппаратуры зарядного комплекса электромобилей
На разных этапах подготовки ЗС к процессу зарядки (КПА) выполняет задачи, соответствующие каждому этапу.
Учитывая важность функций и задач, которые выполняет КПА, к ней предъявляются повышенные требования по готовности и достоверности результатов контроля состояния аппаратуры ЗС и ЭМ. Эти требования обеспечиваются как в процессе проектирования и производства КПА, так и в процессе её эксплуатации.
На этапе проектирования это достигается с помощью схемных и конструктивных методов, включая улучшение принципов построения схем, блоков и узлов.
На этапе производства этого можно добиться за счёт улучшения качества выпускаемой продукции и её однородности.
В процессе эксплуатации, помимо общих методов повышения безотказности КПА, направленных на резервирование наиболее ответственных её элементов, узлов и цепей, применяются специальные методы повышения надежности КПА, направленные на повышение достоверности результатов контроля состояния аппаратуры ЗК (рис. 4).
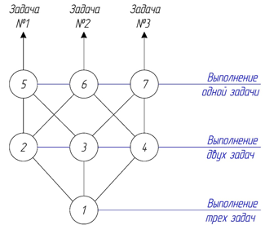
Рисунок 4. Модель структуры контрольно-поверочной аппаратуры ЗК
в виде графа для трёх задач
Основным способом обеспечения высокой методической достоверности КПА помимо периодического контроля точности показаний встроенных измерительных приборов, датчиков и систем является проведение самоконтроля КПА.
Самоконтроль КПА — это определение технического состояния КПА с помощью встроенных средств и/или специальных программ. Следует выделить основные функции самоконтроля КПА:
- Обнаружение внезапных отказов, возникающих в КПА, в том числе отказов, приводящих к пропуску неисправных элементов ЗК.
- Выявление постепенных отказов, вызывающих уход точностных характеристик контрольно-измерительных цепей за допустимые границы.
- Обеспечение возможности локализации места отказа с большой глубиной (до блока, узла, типового элемента замены).
В зависимости от своего предназначения условно, различают два типа самоконтроля (СК): автономный и оперативный.
Автономный СК может проводиться как до начала использования КПА по прямому назначению, так и в случае получения отрицательных результатов непосредственно п процессе применения КПА. Целью автономного самоконтроля является определение технического состояния КПА, для локализации места отказа и определения принадлежности отказа к КПА или элементам ЗК, в данном случае аппаратуре ЗС или аппаратуре управления зарядом ЭМ.
Оперативный СК проводится непосредственно для выявления неисправностей КПА в процессе выполнения ей своих основных задач, и реализуется набором аппаратурных, программных и комбинированных методов.
Автономный СК, осуществляется при использовании тестового метода и/или эквивалента подключаемого электромобиля.
Аппаратурный метод оперативного СК реализуется с помощью, встроенных в КПА устройств, и зачастую называется схемным или встроенным СК. Преимуществом аппаратурного СК является возможность правильности работы КПА как в целом, так и отдельных устройств.
Разработке аппаратурных методов и средств СК посвящено множество научных исследований и специальной литературы [10-12]. Среди них можно выделить:
- дублирование и сравнение [12];
- логические схемы самопроверки [13];
- коды с обнаружением ошибок (например, чётность и т.д.) [12; 13];
- специальные схемы контроля некоторых ответственных элементов (источников питания, генераторов тактовых импульсов, схем записи в память и т.д.) [14];
- встроенные самопроверяемые схемы [15];
- детекторы расхождения с мажоритарными схемами голосования [16].
Главное преимущество встроенного СК — возможность его использования непосредственно во время подготовки ЗК к процессу зарядки, что позволяет начать процесс восстановления работоспособности КПА до того, как последствия отказа существенно нарушат выполнение зарядного протокола или приведут к неисправностям аппаратуры ЗК.
Однако для обеспечения контроля всех компонентов КПА с помощью встроенных средств требуется значительное количество оборудования, что существенно повышает стоимость системы и может привести к возникновению ложноотрицательных результатов из-за сбоев в работе сомой аппаратуры самоконтроля.
Программный метод самоконтроля (СК) предполагает использование специализированного программного обеспечения (ПО), позволяющего осуществлять взаимный контроль работоспособности одних компонентов КПА с помощью других.
Программа самоконтроля представляет собой набор уникальных микроопераций, выполняемых в устройстве и разделённых на независимые блоки. Каждый блок отвечает за проверку определённой части оборудования.
Выполнение программы самоконтроля происходит в периоды, простоя КПА или ее частичной занятости выполнением команд основной программы. В работах [12-14] описаны способы и средства самоконтроля, которые позволяют проводить проверку незанятых функциональных элементов в процессе выполнения основной программы.
Программа самоконтроля имеет более низкий приоритет по сравнению с основной программой и не влияет на ход процесса вычисления, за исключением случаев обнаружения отказа, когда выдаётся команда «Останов КПА».
Программные методы оперативного самоконтроля основаны на параллельном выполнении нескольких программ или добавлении в основную программу дополнительных функций. В первом случае используются несколько одинаковых программ, работающих на разных процессорах и/или в разных запоминающих устройствах. Сравнение результатов осуществляется посредством обмена полученными данными или контрольными суммами/
Основным преимуществом программных методов самоконтроля является отсутствие необходимости в дополнительном оборудовании для их реализации. Однако использование программных методов может привести к увеличению времени самоконтроля из-за необходимости повторного выполнения программы или её части для исправления случайных ошибок.
Комбинированный метод СК, основанный на использовании аппаратурных и программных средств, позволяет эффективно обнаруживать и устранять отказы.
При данном методе встроенные аппаратурные средства отвечают за обнаружение отказов, а программные методы применяются для повторного выполнения программы или её части в случае обнаружения ошибки.
Преимущество такого подхода заключается в том, что время, затрачиваемое на СК, становится незначительным, так как большую часть ошибок обнаруживается за счет встроенных средств. Это означает, что программные методы применяются только после обнаружения отказа, то есть сравнительно редко. Кроме того, объём дополнительной аппаратуры, необходимой для обнаружения и локализации отказа, уменьшается по сравнению с чисто аппаратным методом.
Автономный режим самоконтроля КПА проводится до начала использования КПА по рабочей программе через определенные интервалы времени или наработки аппаратуры ЗК. В данном случае, как правило, в качестве подключаемого к ЗС потребителя в лице ЭМ используется его эквивалент.
Применение данного метода позволяет определить техническое состояние КПА в условиях, близких к зарядным, без использования рабочих режимов. Рабочая программа является лучшей для проверки аппаратуры, поскольку она наиболее точно имитирует условия её использования. С точки зрения работы КПА, не имеет значения, что проверяется — физическая аппаратура ЭМ или её эквивалент, так как они имеют одинаковые передаточные функции. При этом надёжность эквивалента значительно выше.
Конструктивно эквивалент ЭМ может быть выполнен как в виде набора элементов, объединенных между собой, так и состоять из нескольких самостоятельных частей, каждая из которых объединяет элементы, имитирующие функционирование отдельных подсистем ЭМ.
При проведении самоконтроля с использованием эквивалента БА электромобиля осуществляется проверка каналов передачи сигналов в КПА.
Усложнение БА обычно приводит к усложнению её эквивалента, что негативно влияет на достоверность результатов СК.
Самоконтроль КПА с помощью эквивалента БА электромобиля также может осуществляться путём подачи тестовых сигналов [13].
Преимуществом этого метода является высокая точность результатов самоконтроля.
Однако существуют и недостатки данного метода, например,
- низкая оперативность обнаружения отказа;
- ограниченная глубина локализации отказа;
- сложность организации ввиду стационарности установки ЗК.
Поэтому, если есть временные ограничения (например, ограничение времени простоя ЗС), то предпочтительнее использовать тестовые методы самоконтроля.
Существует метод, который заключается в подаче на вход исследуемой системы определённой последовательности входных сигналов (тестов). Полученный на выходе сигнал сравнивается с эталонным сигналом. Устройства, реализующие этот метод, описаны в работах [12].
Существует несколько способов задания в систему тестовых сигналов:
- ввод в КПА чисел из программно-задающей системы имитатором контролируемого объекта;
- ввод в КПА чисел из программно-задающей системы имитатором специальных тестовых сигналов.
Для хранения эталонных и фактических выходных последовательностей требуются значительные объёмы памяти. Решение данной проблемы возможно за счет:
- Сжатия эталонной и фактической информации различными методами;
- Уменьшения количества проверяемого оборудования.
Второй способ не предполагает полной проверки системы. Вместо этого выделяется аппаратное «ядро», которое проверяется до запуска рабочей программы. В состав «ядра» входят наиболее важные компоненты. Перед запуском любого режима проводится самопроверка «ядра». Затем круг проверки расширяется, и начинается проверка общих ресурсов системы. Это придаёт процессу проверки иерархическую структуру
При техническом обслуживании КПА в случае получения результата «не норма» в режиме самоконтроля СК «ядра» применяется расширенная программа самоконтроля центральной вычислительной машины (ЦВМ), охватывающая все её функциональные блоки.
Цель тестовых задач в этом случае — выявить отказавший функциональный блок. Это означает, что программа самоконтроля изменяется, поскольку его цель уже не соответствует конкретным конечным целям проведения СК.
Тестовый метод самоконтроля также широко применяется при проверке дискретных устройств.
Этот метод отличается простотой реализации, высокой точностью локализации мест отказа, отсутствием необходимости в дополнительной аппаратуре.
Однако у него есть и недостатки:
- увеличение объёма памяти ЦВМ;
- невозможность охвата тестовым контролем всех функциональных устройств и элементов КПА.
После применения рабочей программы проводится автономный режим СК КПА. Если в системе КПА-ЗК возникает отказ, то этот режим помогает определить, отказавшую часть системы.
Существует несколько вариантов реализации автономного режима СК КПА:
- Проводится самоконтроль КПА, и по его результатам определяется принадлежность отказа к КПА или аппаратуре ЗК;
- Проводится СК КПА до локализации отказавшего элемента с точностью до функциональных блоков и узлов;
- Проводится режим «Разделение неисправностей» с точностью до КПА или аппаратуры ЗК. Если отказ принадлежит КПА, запускается алгоритм локализации места отказа с глубиной до одного прибора в 82%, до двух — в 16%, до трёх — в 2% случаев.
Увеличение глубины поиска отказа приводит к увеличению элементного состава эквивалента ЭМ, снижению надёжности процесса СК и расширению программы СК.
В зависимости от выполняемых задач можно выделить несколько видом СК КПА:
- самоконтроль функционирования;
- самоконтроль работоспособности;
- диагностический самоконтроль.
В процессе эксплуатации КПА осуществляется проверка выполнения основных функций системы или её отдельных компонентов без количественной оценки параметров, которые определяют техническое состояние КПА. Цель этой проверки — обнаружение внезапных отказов и отказов типа «сбой» в работе системы. Именно такой тип диагностики состояния КПА и называется самоконтролем функционирования.
Самоконтроль работоспособности служит для обнаружения постепенных отказов. При таком виде самоконтроля проводится количественная оценка ухода точностных и других параметров КПА за допустимые пределы.
Диагностический СК предназначен для локализации отказов с точностью до сменных блоков и узлов. При этом диагностический СК опирается на результаты, полученные вследствие проведения алгоритмов СК работоспособности и функционирования [14].
В существующих зарядных комплексах самоконтроль КПА проводится как при регулярно-периодической диагностике работы системы, так и при случайном её использовании.
Регулярный СК КПА проводится в процессе повседневной эксплуатации ЗК через определённые интервалы времени или наработки аппаратуры, указанные в технической документации на ЗС. Этот режим контроля обычно совмещается с техническим обслуживанием ЗС.
Случайный СК проводится при внезапной проверке состояния ЗС, изменении архитектуры ЗК, внесении дополнений в структуру, а также в случае увеличения повторяемости отказов элементов ЗК [15; 16].
Стоит отметить, что существующие системы КПА ЗК довольно обширны и отличаются между собой значительным набором элементов ввиду большого разнообразия на рынке типов зарядных станций.
Кроме того, анализ методов контроля технического состояния, реализованных в КПА ЗК показывает, что отдельные перспективные методы контроля, имеющиеся в распоряжении разработчиков систем контроля технического состояния, не нашли до настоящего времени должного применения [10].
Таким образом, проведенный анализ средств и способов самоконтроля показал, что для разработки перспективной многофункциональной КПА для ЗК различного исполнения целесообразно применять комбинированный метод СК КПА.
В ходе анализа задач, выполняемых контрольно-проверочной аппаратурой (КПА), было выявлено, что она выполняет ряд функций, которые зависят от конкретной задачи. В перспективе количество функций КПА будет увеличиваться, что может негативно сказаться на её надёжности и затруднить поддержание высокого уровня работоспособности с помощью традиционных методов. Это требует разработки новых подходов к снижению влияния отказов КПА на результат подготовки аппаратуры системы управления к применению.
Каждая функция КПА реализуется с помощью определённого набора аппаратных средств, которые частично пересекаются между собой. В результате структура КПА может быть представлена как совокупность функциональных блоков, каждый из которых необходим для выполнения определённой функции или группы функций. Это позволяет оценить степень влияния конкретного отказа с учётом его принадлежности к определённому функциональному блоку на способность КПА выполнять свои задачи.
Анализ средств и способов организации самоконтроля КПА, существующих ЗК ЭМ показал, что основным методом является проведение самоконтроля с использованием эквивалента БА ЭМ. Однако этот метод имеет ряд недостатков:
- невозможность оперативно обнаружить и локализовать отказы в КПА в процессе выполнения задачи при подготовке БА;
- значительные временные затраты на подготовительные операции для проведения самоконтроля;
- жёсткая программа самоконтроля КПА, которая не зависит от содержания задач, которые предстоит решать;
- ограниченная глубина локализации отказов.
Эти недостатки указывают на необходимость наличия встроенных средств самоконтроля КПА и определения оптимальных способов их использования.
При разработке перспективных многофункциональных КПА целесообразно применять комбинированный метод самоконтроля. В качестве программного метода рекомендуется использовать исходную рабочую программу функционирования КПА, поскольку она обладает необходимыми диагностическими свойствами. Аппаратные средства самоконтроля могут быть представлены в виде встроенных средств. Однако использование эквивалента БА не исключается полностью.
Список литературы
- Исследование энергоэффективности применения пневмоколесного транспорта с электроприводом при добыче ископаемых открытым способом / В. В. Бирюков, Б. В. Малоземов, Н. И. Щуров [и др.] // Горный информационно-аналитический бюллетень (научно-технический журнал). – 2024. – № 12-1. – С. 301-315. – DOI 10.25018/0236_1493_2024_121_0_301. – EDN FLGKMS
- Филина О.А. Определение системы диагностики электродвигателей электромобиля / О. А. Филина, А. И. Исяндавлетов, Р. Р. Салихов // Научный альманах. – 2025. – № 1-4 (123). – С. 70-73. – EDN PZWWXJ
- Shchurov N.I. Modelling and simulation hybrid electric vehicle with hydrogen fuel cells / N. I. Shchurov, S. I. Dedov, A. A. Shtang // International Journal of Hydrogen Energy. – 2024. – Vol. 95. – P. 481-488. – DOI 10.1016/j.ijhydene.2024.08.044. – EDN VQNMIP
- Филина О.А. Квалиметрия моделей / О. А. Филина, В. П. Дюндина // Актуальные проблемы современной науки, техники и образования: Тезисы докладов 82-й международной научно-технической конференции, Магнитогорск, 22–26 апреля 2024 года. – Магнитогорск: Магнитогорский государственный технический университет им. Г.И. Носова, 2024. – С. 84. – EDN FKDNWN
- Дедов С.И. Синтез имитационной модели быстрой зарядной станции с накопителем энергии для карьерного транспорта / С. И. Дедов, Н. И. Щуров, А. А. Штанг // Горный информационно-аналитический бюллетень (научно-технический журнал). – 2024. – № 11-1. – С. 187-200. – DOI 10.25018/0236_1493_2024_111_0_187. – EDN LMBPBS
- Абдуллина А.Р. Вынужденные режимы системы тягового электроснабжения / А. Р. Абдуллина, Е. С. Снежинская // Наука, образование, общество: тенденции и перспективы развития: сборник материалов III Всероссийской научно-практической конференции, Чебоксары, 17 ноября 2023 года. – Чебоксары: Общество с ограниченной ответственностью "Центр научного сотрудничества "Интерактив плюс", 2023. – С. 129-131. – EDN SYCESU
- Павлов П.П. Оценка эффективности устройств защитного отключения в шахтных сетях с преобразователями частоты / П. П. Павлов // Безопасность труда в промышленности. – 2025. – № 6. – С. 64-70. – DOI 10.24000/0409-2961-2025-6-64-70. – EDN GGGIPI
- Матричная экспонента в линейных моделях систем / А. Р. Абдуллина, Е. С. Снежинская, Р. И. Кашапов, Е. В. Матвеев // Инновации в науке и практике: сборник трудов по материалам X Всероссийского конкурса научно-исследовательских работ, Уфа, 14 ноября 2022 года. – Уфа: Общество с ограниченной ответственностью "Научно-издательский центр "Вестник науки", 2022. – С. 19-31. – EDN AJZALY
- Павлов П.П. Анализ влияния массового внедрения электромобилей на нагрузку энергосистем и их экономическую устойчивость / П. П. Павлов, А. Э. Павлов // Экономика и управление: проблемы, решения. – 2025. – Т. 2, № 4 (157). – С. 73-79. – DOI 10.36871/ek.up.p.r.2025.04.02.008. – EDN LAFLPK
- Ахметов Р.Р. Классификация технических средств диагностирования / Р. Р. Ахметов, Д. В. Сахапов, О. А. Филина // Перспективы развития науки в современном мире: Сборник трудов по материалам XI Всероссийского конкурса научно-исследовательских работ, Уфа, 12 декабря 2022 года. Том Часть 1. – Уфа: Общество с ограниченной ответственностью "Научно-издательский центр "Вестник науки", 2022. – С. 114-125. – EDN PRPGOY
- Study of ways to influence the combustion process in an ejector pulsating air-breathing engine in order to improve its specific performance / K. V. Migalin, I. P. Boychuk, V. V. Kukartsev [et al.] // International Journal of Hydrogen Energy. – 2024. – Vol. 96. – P. 343-350. – DOI 10.1016/j.ijhydene.2024.11.303. – EDN TFUIWW
- Хаммедов Э.С. Применение методов для диагностирования объектов / Э. С. Хаммедов // Новое слово в науке: стратегии развития: Сборник материалов Международной научно-практической конференции, Чебоксары, 04 июня 2021 года. – Чебоксары: Общество с ограниченной ответственностью "Центр научного сотрудничества "Интерактив плюс", 2021. – С. 150-151. – EDN ZVWDPT
- Выбор оптимальной схемы построения зарядной электрической станции для электромобилей / И. В. Черепенькин, А. Э. Павлов, Р. Р. Гарифуллин, П. П. Павлов // КИП и автоматика: обслуживание и ремонт. – 2024. – № 10. – С. 61-63. – EDN WPJWTV
- Осетинский Г.В. Обнаружение неслучайных отклонений по методу средних / Г. В. Осетинский, О. А. Филина // Актуальные вопросы современной науки: теория, технология, методология и практика: Сборник научных статей по материалам V Международной научно-практической конференции, Уфа, 19 марта 2021 года. – Уфа: Общество с ограниченной ответственностью "Научно-издательский центр "Вестник науки", 2021. – С. 69-72. – EDN OCRZNY
- Сидоров А.Е. Разработка систем преобразования энергии для зарядных станций и электромобилей с оценкой их стоимости и влияния на ценовую доступность инфраструктуры / А. Е. Сидоров, Б. И. Сафиуллин // Экономика и управление: проблемы, решения. – 2025. – Т. 2, № 4 (157). – С. 97-107. – DOI 10.36871/ek.up.p.r.2025.04.02.011. – EDN NQHVMI
- Черепенькин, И.В. Методы графического изображения результатов эксперимента / И. В. Черепенькин // Общество и наука: векторы развития: сборник материалов Всероссийской научно-практической конференции, Чебоксары, 18 декабря 2020 года / ФГБОУ ВО «Чувашский государственный университет им. И.Н. Ульянова»; Кыргызский экономический университет им. М. Рыскулбекова. – Чебоксары: Общество с ограниченной ответственностью "Центр научного сотрудничества "Интерактив плюс", 2020. – С. 112-114. – EDN JZYRCJ



